相位差模糊控制在線控制算法中的應用設計

Synchro軟件建立的整體分析模型如圖9所示。本文引用地址:http://www.104case.com/article/160963.htm
為了驗證本文設計的模糊線控制方法的控制效果,在相同的交通條件下分別對本文的模糊線控制和傳統的定時線控制方法(所研究路段正在使用的線控制配時方法)在龍口西路和龍口東路兩個路口組成的干線上進行了仿真比較。選龍口西路為相位差基準路口。停車線前車輛的到達服從泊松分布,干線上的關鍵車流為由西向東的單向交通流,考慮該方向的協調控制,即相位差是該方向上的。設控制方案中最短綠燈時間為20 s,最長綠燈時間為80 s,每隔6個周期對運行方案進行調整,評價指標是平均車輛延誤。設次干道的車流量均為600 PCU/h,分別對主干道交通流量為1 000 PCU/h,1100 PCU/h,1 200 PCU/h,1 300 PCU/h,1 400 PCU/h以及1 600 PCU/h時的不同情況下進行了6次仿真對比,每次仿真周期為100個信號周期。
模糊線控制主程序的流程圖如圖10所示。傳統定時線控制使用交通信號控制配時軟件Synchro來進行仿真。仿真結果如表3所示。
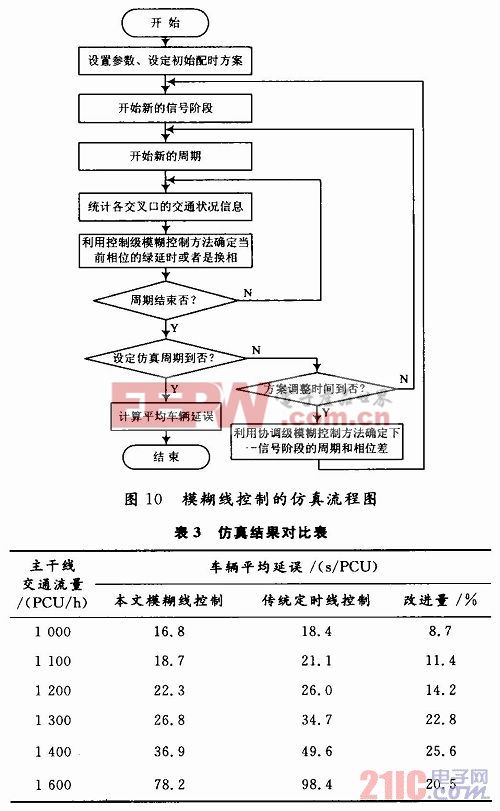
從表3可以看出,本文設計的模糊線控制方法可以有效減少干線上交叉口的車輛平均延誤,并且隨著主干線交通流量的增加,比傳統定時線控制改善的幅度越大,體現了本文設計的模糊線控制算法的優越性,提高了干線的通行效率。
5 結語
城市干線交通信號協調控制,既是交通領域研究的一個熱點,又是該領域研究中的一個難點。本文在設計協調級模糊控制器時,提出在模糊控制器的設計輸入中加入交通特征參數的變化值,這樣可以把交通特征的變化趨勢加進來。仿真實例證明了本文設計的模糊線控制算法能有效減少干線上交叉口的平均延誤,可以在一定程度上解決城市交通擁堵問題,提高交通效率。
城市交通系統是一個綜合性的大系統,要提高交通網的運行效率,單單依靠交通信號控制是遠遠不行的,應該將交通規劃、交通管制、交通誘導等技術與交通信號控制技術相結合對交通進行綜合的研究與治理,才能取得較好的效果。








評論