相位差模糊控制在線控制算法中的應用設計

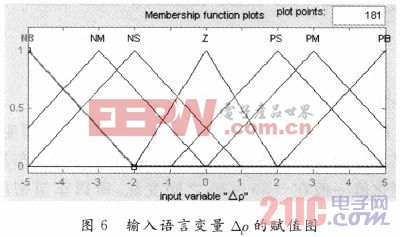
輸入△ρ的各模糊語言值的隸屬度函數表示,圖形表示法如圖6所示。本文引用地址:http://www.104case.com/article/160963.htm
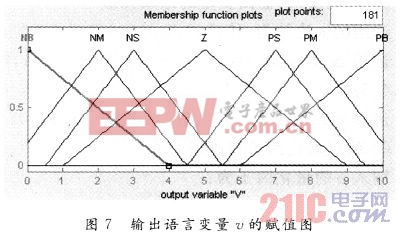
輸出v的各模糊語言值的隸屬度函數表示,圖形表示法如圖7所示。
模糊后的值分別記為:![]() 。
。
(3)模糊控制規則
相位差模糊控制器的模糊控制是基于這樣的規則的:密度大,則車速低;密度小,則車速大。如果車流密度變化值減少,說明下一信號控制階段的車流密度比本階段可能會減少,則應在密度確定的車速的基礎上增加車速;反之如果車流密度變化增加,說明下一信號控制階段的車流密度比本階段可能會增加,則應在密度確定的車速的基礎上減少車速。具體的模糊控制規則表如表2所示。
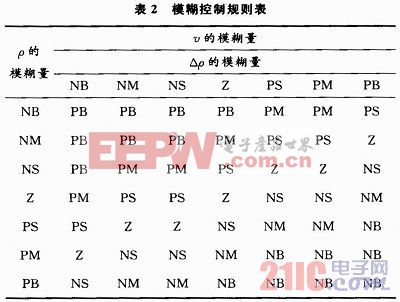
表2中每一個元素表示一條模糊控制規則,共有7×7=49條模糊控制規則,例如第一條規則是:
![]()
將上述隸屬度函數和模糊控制規則輸入到Matlab后,可得模糊推理系統輸出曲面,如圖8所示。
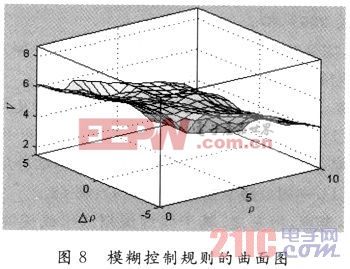
具體的模糊推理和解模糊以及論域反變換方法與其他模糊控制器設計是一樣的,這里就不再詳細敘述。至此,相位差模糊控制器設計完成。
4 實例分析
選擇某城市干線道路來驗證本文設計方法的有效性。
道路交通概況如下:天河北路是天河地區一條東西向生活性主干道,全長3.2 km,其中大道路口到天壽路路口之間的路段是雙向10車道,兩板塊結構;天壽路口到天科路口之間的路段是雙向6車道,兩板塊結構。該道路周邊是重要的高檔辦公區和高檔住宅區,土地開發密度較高。另外,由于火車東站、體育中心等交通吸引源的存在,也增加了該條道路的交通需求。天河北路目前設置信號燈的路口或路段共有11處(9個信控交叉口,2個人行過街點),由于路口之間的信號沒有協調,所以車輛走走停停,啟動頻繁,延誤較大,車速只有25 km左右。








評論