超聲波的移動機器人導航的設計原理

3.5 循環控制與輪詢測距
由于超聲波之間有干擾,采用輪詢的方式依次打開超聲波,每次只測一個,這樣可以有效地避免干擾,為了提高實時性可以控制定時器周期,比如設置為35ms,這樣四路超聲波輪詢一次大約為140ms,足以滿足實時要求。
4 機器人控制的實現
圖3 為利用超聲波的反饋信息控制機器人直流電機閉環系統的總體結構圖。
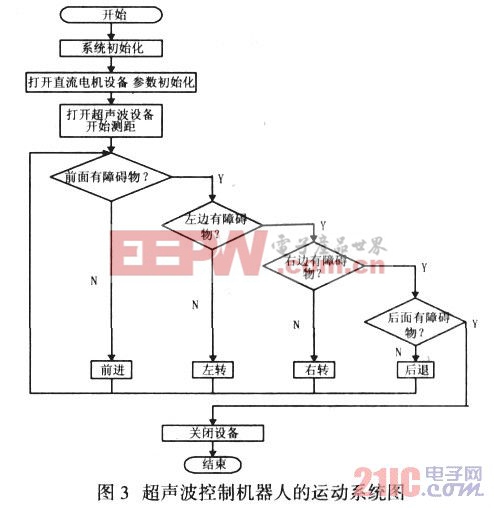
linux 系統中超聲波傳感器為只讀的字符設備,具體應用為在應用程序下打開超聲波設備,然后在驅動中測距,測得的數據傳到應用程序,應用程序中有超聲波的避障算法,根據算法判斷障礙物的位置給直流電機控制信號進行避障導航。
觸摸屏中的圖形界面中含有機器人的指令設置, 可以設置運行速度,圖像采集與超聲波模塊的打開與關閉,是否開啟機器人模糊算法運行軌跡還是使用普通的PID 調節, 這使得機器人有很多種方案可以選擇。
機器人的每一次行為都是根據超聲波傳感器測得的值和當前機器人運行的即時速度來來給出將要運行的時間, 在遇到障礙物時(0










評論