4.2 實驗結果分析
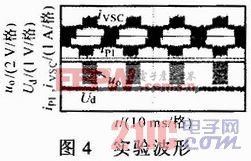
在仿真結果的基礎上,進行了實驗測試。實驗采用2臺電機對拖作為實驗負載。在已有的實驗平臺上,對2臺電機的電流(轉矩)進行跟蹤測試,Ud為給定電壓,iPI為電機A的實際電流,iVSC為電機B的跟蹤電流,如圖4所示。由圖可見,iVSC與iPI很好地實現了跟蹤效果。
5 結論
分析了使用PI控制實現雙電機力矩平衡控制所存在的不足,設計了滑模變結構控制,進行了穩定性分析,并成功地將滑模變結構控制算法應用到雙電機的力矩平衡控制中。最后通過仿真,驗證了該控制策略的優點,得到了理想的跟蹤控制效果。










評論