基于自抗擾控制器的異步電機變頻調速系統

摘要:設計了一種采用優化的自抗擾控制器(ADRC)的異步電機變頻調速系統。應用擴張狀態觀測器的雙通道補償作用,統一觀測系統的總擾動并加以補償,使控制對象被近似線性化和確定性化。實驗結果表明,相較于經典PID控制器,采用自抗擾控制的異步電機變頻調速系統具有更高的動靜態性能以及對負載擾動具有更好的魯棒性。
本文引用地址:http://www.104case.com/article/160578.htm1 引言
隨著電力電子技術、微電子技術和微處理器的不斷發展,異步電機變頻調速系統的調速性能得到了很大提升,與傳統的直流電機調速系統相比,它具有結構簡單、調速范圍寬、效率高、特性好、運行平穩、安全可靠等特點,在生產實踐中得到了廣泛應用。變頻器加異步電機構成的變頻調速系統大有取代直流調速系統的發展趨勢。
可編程邏輯控制器(PLC)被公認為現代工業自動化的3大支柱之一,其控制系統穩定可靠,通訊組網靈活,可方便集成到現場總線控制系統中,適應當前自動化程度日益提高的要求。PLC變頻調速系統以其優越的性能得到了越來越多的重視,但對于多變量非線性強耦合的異步電動機,采用常規的定參數PID控制方法,對負載變化的適應能力差、抗干擾能力弱且受系統參數變化影響大。因此,在現有硬件設備的基礎上,如何進一步提升變頻調速系統的控制性能,是一個亟待解決的問題。
這里在異步電機變頻調速系統中采用了自抗擾控制器方法,將系統的內擾、外擾等視為系統總擾動,由擴張狀態觀測器統一觀測并加以補償,使控制對象被近似線性化和確定性化,從而實現了系統的非線性控制,并通過實驗驗證了該控制方案的有效性。
2 異步電機變頻調速系統數學模型
由電流跟蹤型SPWM逆變器供電的異步電機變頻調速系統在d,q兩相旋轉坐標系下的狀態方程可用五階非線性模型描述,當忽略變頻器時滯時,系統模型可用降階的二階非線性模型描述:
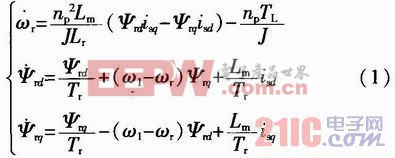
式中:ω1為電氣同步角速度;ωr為轉子速度;isd,isq分別為d,q軸的定子電流;ψrd,ψrq分別為d,g軸的轉子磁鏈;np為極對數;Lm為互感;Lr為轉子電感;J為轉動慣量;Tr為電機轉子時間常數;TL為負載轉矩。
由文獻可知,變頻器在矢量運行模式下系統可逆,且整個系統可以簡化為轉速的單輸入、單輸出系統。
3 異步電機變頻調速自抗擾控制系統
3.1 一階自抗擾控制器的設計
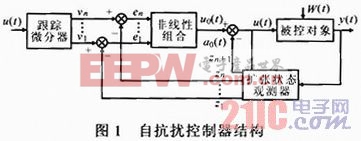
圖1為自抗擾控制器結構圖。該控制器是基于跟蹤微分器(TD)來安排過渡過程、擴張狀態觀測器(ESO)來估計系統狀態、模型和干擾,非線性誤差反饋(NLSEF)來給定控制信號的一種非線性控制器。
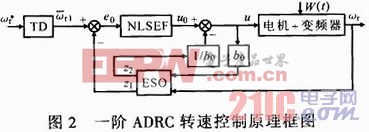
對于矢量控制的異步電機驅動系統,采用一階模型控制器,相應采用二階ESO結構。矢量控制中,一般保持轉子磁鏈恒定,利用ADRC的特點,對于轉動慣量變化引起的系統模型誤差和負載擾動的影響等歸于擴張狀態z2統一觀測并加以補償。基于一階ADRC的轉速控制器原理框圖如圖2所示。
3.2 ADRC的優化
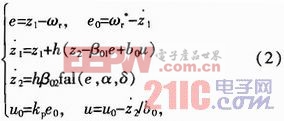
一階ADRC結構中,ESO輸出被控對象和未知擾動的觀測值,沒有被控對象的微分項輸出,控制器無需跟蹤微分器的輸出,因此在ADRC結構中省略跟蹤微分器環節。對于一階對象,采用線性的比例調節代替NLSEF,可在保證控制器性能的前提下,有效地簡化模型,減小計算量,從而得到結構優化的一階ADRC模型。圖3為結構優化的一階ADRC轉速控制框圖。優化后的轉速控制器的完整算法為:











評論