基于PAC的電機控制器快速控制原型的研究

3.2 實時處理器
從圖3可看出在電機控制器RCP的過程中,實時系統發揮著一個承上啟下的作用。實時處理器與FPGA交互部分的程序是對時間要求嚴格,優先執行;而數據存儲和與Host交互的程序優先級較低,正常調度。
實時處理器與FPGA模塊進行數據交互使用了FPGA接口操作和DMA FIFO技術,FPGA接口操作是以FPGA VI的單個變量為對象進行讀寫操作;DMA FIFO技術是通過先入先出隊列實現RT到FPGA和FPGA到RT的大量數據的高速傳輸。
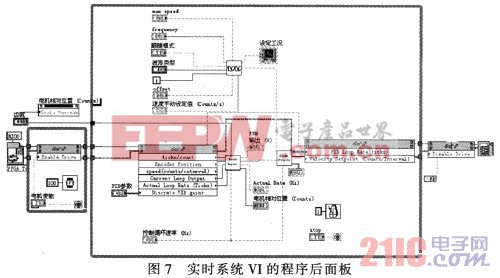
本實驗中從Host主機傳輸過來的啟停命令、需求速度、PID參數都是通過FIFO實時傳送到FPGA程序上。而FPGA執行磁場定向控制中的反饋信號和中間變量同樣通過FIFO傳送到RT上。圖7為實時系統VI的程序后面板。本文引用地址:http://www.104case.com/article/160481.htm
3.3 FPGA模塊
FPGA具有高性能、可重新配置、小尺寸和較低工程開發成本的特性,但傳統的EDA工具對FPGA的開發門檻高、開發周期長。而NI LabVIEW FPGA模塊為Compact RIO上的FPGA芯片提供了圖形化的開發環境,使Compact RIO較其他PAC具有更大的靈活性和可重配置性。FPGA運行在高速時鐘下,定時/觸發分辨率達25 ns,并且擁有基于硬件電路的并行執行特點,對比于傳統的順序執行結構提高了電機控制性能。
從圖3可以看出磁場定向所有算法都是在FPGA上執行的;主要包括:電流和速度采集模塊、坐標變換模塊、電流環PID控制模塊、速度環PID控制模塊、SVPWM輸出模塊。除了采集模塊和輸出模塊是順序執行之外,其他3個模塊都是可以采用多級流水線的方式并行執行的。
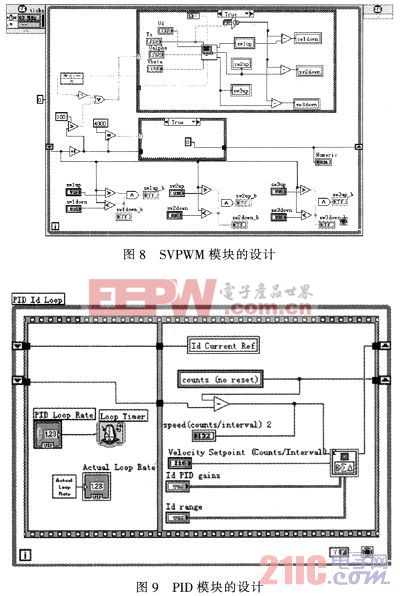
NI LabVIEW FPGA模塊圖形化的開發環境使用戶可以既快速又高效地編寫程序進行硬件控制和算法實現。由于篇幅有限,圖8和圖9只展示了SVPWM模塊、PID算法的程序實現圖。
4 結論
本文在深入了解了可編程自動控制器的基礎上,結合了NI Compact RIO的高可靠性、強大的軟件功能、易于開發的特點,對基于Compa ct RIO的電機控制器快速控制原型的進行了研究,并以永磁同步電機磁場定向控制為例進行設計,說明了基于PAC的快速控制原型方法適合用于電動汽車電機控制器的開發。

pid控制器相關文章:pid控制器原理










評論