基于航跡推算的移動式機器人定位系統設計

摘要:為實現移動式機器人的智能工作,研究了航跡推算定位技術,采用陀螺儀、光電編碼器等傳感器對已知航線的機器人進行行走定位。系統由驅動模塊、傳感器和反饋模塊以及控制模塊等組成,其模塊化設計充分整合了系統資源,抗干擾能力強,同時使用了伺服器驅動電機減小行走誤差,成本低廉,可移植性強,能很好地運用于工業加工機器人和特種作業機器人。
關鍵詞:航跡推算;陀螺儀;光電編碼器;伺服器;模塊化設計
自工業革命以來機械被廣泛運用到各個領域。隨著人類社會生產的發展,人們越來越需要高智能、高精度的機器完成各類繁重的、高精度、高風險的作業,于是,完成某些特定任務的機器——機器人逐步發展起來。移動式機器人需完成某些任務,其關鍵在于定位,即機器人必須知道自己現在的位置和將要“行走”的方位。根據機器人運用的環境不同,定位精度也大不相同,現有的定位技術大致可分為航跡推算、信號燈定位、基于地圖的定位、路標定位以及視覺定位等幾大類。
本文闡述的是一種運用多種傳感器的航跡推算定位技術。該種定位方式適用于已知航線的行走,能夠準確的從出發地快速行進到目的地,具有良好的嵌套性,可以成為某些大型定位系統的基本單元,同時具有抗干擾能力強、維護方便的特點。
1 系統總體設計
1.1 系統的總體結構
系統采用航跡推算原理對移動式機器人進行定位,航跡推算即利用外部傳感器的數據實現機器人實時位置和運動方向的估計,短期定位精度高。航跡推算技術的關鍵是需測量出機器人單位時間運動的距離以及這段時間內機器人航向的變化。在本設計中,主要采用編碼盤和陀螺儀進行航跡推算來實現定位,系統采用模塊化設計,由驅動模塊、傳感器和反饋模塊以及控制模塊等組成,原理框圖如圖1所示。
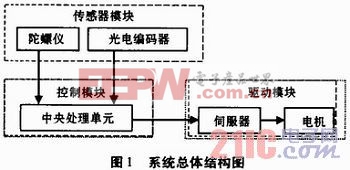
為提高抗干擾能力,系統各模塊之間相互獨立使用ISP串行通訊進行數據通信,每個模塊都與控制系統構成一個閉環單元,控制系統通過算法整合,從而降低了各個單元之間的干擾和誤差的累積。控制系統發出路線的整體行走方案,再由各個閉環單元檢測是否按原定計劃實施,當出現錯誤和誤差時,系統通過采集的數據即刻做出實時調整,實現快速、準確定位。
1.2 系統的數學模型
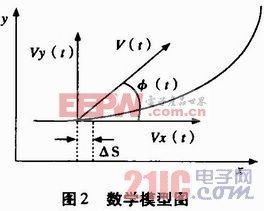
系統的數學模型可以看成是一個平面坐標定位,在平面內任何一個點的速度可以表示為線速度V和角速度V,其坐標為(x,y)。當一個物體在平面內從一點移動到另一點時,只要畫出運動軌跡,就可以計算出在該軌跡上任一點的速度和坐標,以進行定位。假設某一運動軌跡方程已知,則需要按其軌跡進行運動定位,其數學模型如圖2所示。









評論