基于航跡推算的移動式機器人定位系統設計

2.4 中央處理單元
系統使用MEGA128單片機作為主控芯片,該單片機具有2個8位定時器和2個16位定時器以及10路可編程PWM,擁有8個10位ADC通道,因此能夠實現對多傳感器的信號采集處理。本文引用地址:http://www.104case.com/article/160341.htm
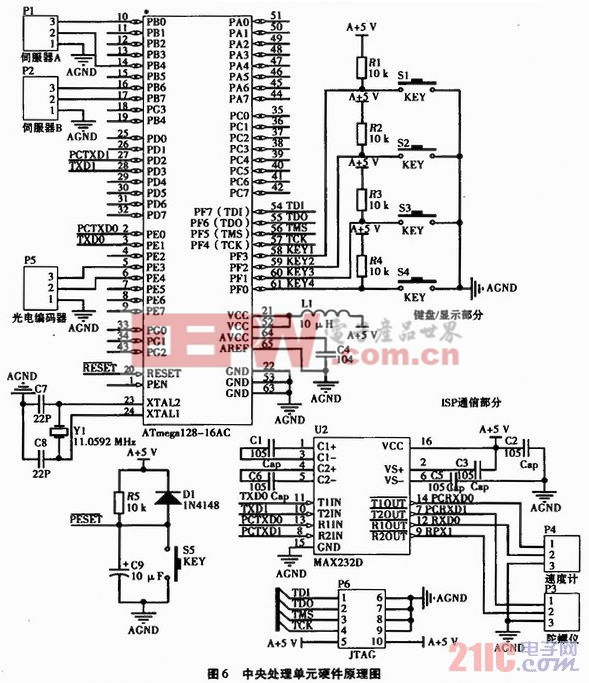
如圖6所示為中央處理單元硬件電路原理圖,包括了24 V轉5 V的直流穩壓電源、晶振電路以及外圍拓展口電路。在電源部分使用LM117穩壓管,能夠很好地控制電源紋波,使單片機穩定工作。在外圍拓展口部分使用并行總線結構,能夠很方便進行使用和開發。

如表1所示為中央處理單元中單片機使用的主要端口功能,包括通信與控制信號的發出以及對編碼盤的計數。
3 結果與分析
為驗證系統的可行性與穩定性,使用了一個四輪全向輪結構小車進行測試,測試方案如下:在2 m×2 m的平面場地中設定A、B兩點,小車在兩點間分別多次作直線運動與弧線運動,每次均將實際運行軌跡與理論軌跡進行比較,并分析定位誤差。
(1)直線運行小車直線運行10次,每次運行出發地點A均相同,檢測實際運行軌跡與理論軌跡誤差在5 mm以內,且小車可以快速定位到C點,而C點在B點誤差圓內。
(2)弧線運行小車弧線運行10次,每次運行出發地點A均相同,檢測實際運行軌跡與理論軌跡最大誤差為1 cm,且小車可以快速定位到C點,而C點在B點誤差圓內。
試驗證明,系統可以完成對任意預設路徑的快速定位,基本保證到達目的地,其誤差在允許范圍之內,且系統充分對CPU資源進行了合理運用,在外圍硬件電路設計時考慮了最大程度減小外界對系統的干擾,穩定性較強,達到了預期設計目標。









評論