BOA技術在車輛感知網絡中的應用研究

3.3 BSP的移植過程
板級支持包BSP(Board Support Package)是介于嵌入式硬件和EOS之間的一層系統軟件,負責向VxWorks提供與硬件環境的基本接口,其移植的主要過程有:
第一步配置嵌入式處理器的CPU型號,主頻等相關參數,為整個軟件系統提供底層硬件支持;
第二步根據硬件模塊配置相關設備驅動和系統中斷服務程序;
第三步定制總線及芯片引腳功能,配置存儲空間映射和存儲空間大小;
第四步定制EOS功能,為軟件系統提供一個多任務工作環境。
BSP的配置是系統重中之重,合理的配置能夠保證系統穩定運行。
4 代碼工作
選擇好的調試方法,可以提高學習和項目開發的效率。目前VxWorks程序開發中常用的調試方法有網絡和串口調試方法,在本應用系統中選擇網絡調試。正確的配置方法是在所建立的Bootable工程的VxWorks組件中選擇WDB連接和END驅動,所生成的VxWorks映像通過網絡加載到內存運行。主機端還需要在Target Server配置和目標機相連,配置中BackEnd選擇wdbrpc,目標機的IP設置為192.168.1.11,核心文件指向主機FTTP下載目錄中的VxWorks映像,最選擇all symbol并選中Synchronize Target/Host Symbol Table。配置如果正確,即可啟動Tar get Server。
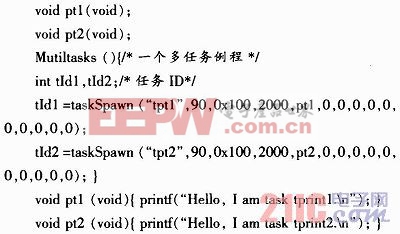
此時可以在當前工作空間下建立一個可下載的應用程序模塊,在該模塊下新建一個程序文件Multitasks.c經編譯生成Multitasks.o,下載到目標機,最后在主機的wShell中輸入Mutiltasks,在超級終端中即可以看到任務的執行情況,其中代碼如下:
在開發過程中使用應用程序模塊是非常方便的,如果要形成最終產品,需要將調試成功的模塊遷移到bootableVxWorks映像中,方法是將源程序加入bootable VxWorks項目,并在usrAppInit.C文件中的usrAppInit()函數下添加入口代碼Mutiltasks(),代碼如下所示。最后編譯成符合現場要求的VxWorks映像并完成遷移工作。
void usrAppInit(void){
#ifdefUSER_APPL_INIT
USER_APPL_INIT;
#endif
Mutihasks();}
5 結論
本文針對車聯網的特點介紹了目標板上移植嵌入式BOA的方法和步驟,交叉編譯環境的建立方法及控制器的設計思路。可以看出,BOA技術支持車聯網,可以滿足細致部件的感知。
此外,針對于系統的“車聯網”技術還需要深入的研究,BOA只是在此研究上的一個基本內容。由于感知是通過虛擬地址映射得到每一個部件的ID,故此需要一個控制中心,在工程中需要控制中心與感知部件總體考慮,文中沒有在此內容上有過多描述。在實際應用中采用IPv6地址,還是虛擬地址這取決于成本與技術條件,這些是以后需要深入研究的內容。本文引用地址:http://www.104case.com/article/160073.htm






評論