基于激光傳感器的智能車的坡道檢測

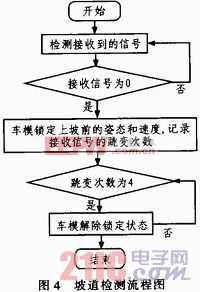
在車模通過坡道的整個過程中,不難發現,單片機接收到的信號由以下變化過程1—0—1—0—1,共發生了4次跳變,根據這個原理設計算法。當發生第一次跳變時,說明車模前方有坡道,此時車模進入盲過階段,車模按前一狀態保持運動,直至單片機檢測到最后一次跳變為止,具體程序流程如圖4所示,如此便可以實現單個激光傳感器對坡道的檢測。本文引用地址:http://www.104case.com/article/159751.htm
3 實驗結果分析
將該方案應用到智能車實際的賽道檢測算法中,通過實驗,該方案可以提前檢測到跑道,而且提前量可以根據自己的需要進行調整。相比于用傾角傳感器和加速度傳感器檢測坡道的方案,該方案既經濟實惠又能提前檢測出坡道。但應用肓過法對車模的機械要求較高,在通過坡道的過程中不能自行調整,實驗過程中可以根據實際情況選擇是否再加一排紅外傳感器或作用距離比較近的激光管來克服這個不足。
實驗過程中還發現一些問題,即在車模前部的左側或右側放置的激光管如果太靠近地面,則容易把周圍的淺色物品識別為坡道,因此傳感器的放置位置應當盡可能高一些,或者把激光的功率適當調小,使其作用距離不要太遠,減小誤判的幾率。
4 結束語
本文介紹了一種激光傳感器智能車利用單個激光管檢測坡道的方法,通過記錄信號跳變次數,從而得到了智能車通過坡道時的相關信息。通過實驗,該方法簡便可行,易于實現,成本較低,可以提前檢測到坡道,且提前量的大小可以調整,利用該方案智能車可以順利地通過坡道。








評論