基于激光傳感器的智能車的坡道檢測

根據以上傳感器識別賽道的原理,可以把激光管和接收管放置在車模前側的左邊或右邊,使發射的激光平行于賽道,如圖2所示,還可以通過調整激光的作用距離來調整檢測坡道提前量的大小。本文引用地址:http://www.104case.com/article/159751.htm

2.2 軟件實現
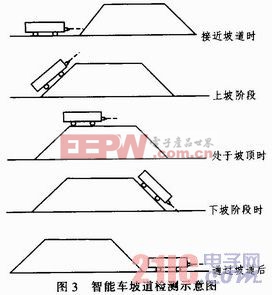
當車模前方沒有坡道時,激光平行于賽道,此時,光線不會被反射,即接收管不會接收到光線,單片機收到的返回值為1。當車模靠近坡道到一定距離時,由于賽道的兩側是白色部分,激光管又置于車模的兩側,所以此時激光照射到賽道的白色部分,光線被反射,接收管接收到光線,單片機收到的返回值為0。當車模處于爬坡狀態和坡頂時,光線照射不到賽道,不會被反射,接收管不會接收到光線,單片機收到的返回值為1。當車模處于下坡階段時,光線照射到賽道的白色部分,發生反射,接收管接收到光線,單片機收到的返回值變為0。當車模通過坡道后,光線又照射不到賽道,不會被反射,接收管不會接收到光線,單片機收到的返回值為1。具體過程如圖3所示。








評論