基于矩角控制的PMSM伺服系統(tǒng)仿真與設(shè)計(jì)

4 仿真與實(shí)驗(yàn)結(jié)果
4.1 仿真結(jié)果
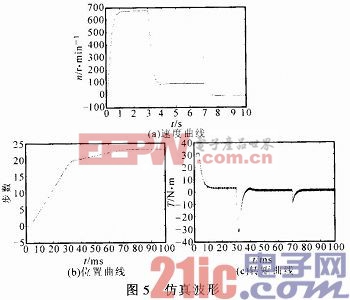
電動(dòng)機(jī)在高速運(yùn)行時(shí),由于轉(zhuǎn)動(dòng)部分具有相當(dāng)大的動(dòng)能,起動(dòng)和制動(dòng)都需要一定的加速和減速時(shí)間。步進(jìn)傳動(dòng)的突跳過(guò)程就需要一定的升速時(shí)間,在這段時(shí)間內(nèi),θ逐漸增大,轉(zhuǎn)子轉(zhuǎn)速逐漸升高,只要在轉(zhuǎn)子轉(zhuǎn)速升高到等于步進(jìn)磁動(dòng)勢(shì)的平均轉(zhuǎn)速時(shí),電動(dòng)機(jī)的動(dòng)態(tài)角誤差還沒(méi)有達(dá)到允許的最大值,電動(dòng)機(jī)就不會(huì)失步。
在步進(jìn)運(yùn)動(dòng)中,定子電流矢量的運(yùn)行角度為θs,平均角頻率為ω1,轉(zhuǎn)子運(yùn)行的角度為θr,角頻率為ω,T與θ有關(guān),而θ=θs-0r。只要能保證θ總小于允許的最大值,θs既可以恒定的角頻率增加,也可以變化的角頻率增加,前者ω1恒定,屬于恒頻控制;而后者ω1變化,屬于升降頻控制。升降頻控制下速度、位置及轉(zhuǎn)矩仿真曲線如圖5所示。本文引用地址:http://www.104case.com/article/159425.htm
4.2 實(shí)驗(yàn)結(jié)果
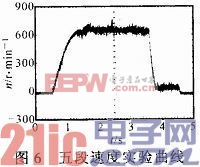
為獲得較大的起動(dòng)、制動(dòng)轉(zhuǎn)矩,給電機(jī)輸入不同的電流矢量。在第1,3階段,輸入兩倍額定電流,使電機(jī)具有很大的加速度,在盡量短的時(shí)間內(nèi)達(dá)到下一階段,在其他階段輸入額定電流。
第1階段為升速過(guò)程,給定子超前轉(zhuǎn)子3步的電流矢量并通以大的電流矢量,使電機(jī)以最大加速度加速,并在最短時(shí)間內(nèi)達(dá)到恒定轉(zhuǎn)速;第2階段為恒轉(zhuǎn)速運(yùn)行階段,將電機(jī)的速度控制在一恒定值。當(dāng)轉(zhuǎn)速低于設(shè)定轉(zhuǎn)速時(shí),給定子加超前的電流矢量;當(dāng)速度高于設(shè)定轉(zhuǎn)速時(shí),給定子加滯后的電流矢量,這樣就能盡量使電機(jī)速度控制在恒定轉(zhuǎn)速;第3階段為減速階段,電機(jī)定子的給定電流滯后3步轉(zhuǎn)子的電流矢量,這樣電機(jī)以最大加速度進(jìn)行降速,當(dāng)電機(jī)運(yùn)行到設(shè)定的脈沖數(shù)后,電機(jī)將進(jìn)入低速運(yùn)行階段;第4階段為低速運(yùn)行階段。此階段運(yùn)行速度較低,主要作用是為了減小電機(jī)慣性,實(shí)現(xiàn)電機(jī)最后一個(gè)階段的精確定位;第5階段為制動(dòng)定位階段,當(dāng)電機(jī)轉(zhuǎn)速趨近于零時(shí),為保證定位的精確,令定子磁動(dòng)勢(shì)的位置保持在設(shè)定的目標(biāo)位置上,此時(shí)產(chǎn)生復(fù)位轉(zhuǎn)矩Tx,Tx將力圖迫使轉(zhuǎn)子回到提前設(shè)定的位置上,從而實(shí)現(xiàn)電機(jī)的定位控制。五段速度實(shí)驗(yàn)曲線如圖6所示。
5 結(jié)論
通過(guò)對(duì)矩角控制下PMSM伺服控制系統(tǒng)的仿真和實(shí)驗(yàn)可知,運(yùn)用矩角控制理論的PMSM伺服系統(tǒng)具有良好的動(dòng)態(tài)特性與定位特性,完全可以
滿足現(xiàn)實(shí)中對(duì)于速度以及定位精度的高要求,同時(shí)對(duì)于PMSM在高性能控制場(chǎng)合下的應(yīng)用打下堅(jiān)實(shí)的理論與實(shí)驗(yàn)基礎(chǔ)。










評(píng)論