基于矩角控制的PMSM伺服系統仿真與設計

2.3 定位控制方法
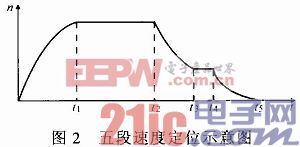
一般的伺服控制系統將速度變化分為5段,即起動、穩速、降速、低速爬行及制動。當t=0時開始突跳過程。第1段0~t1為升頻過程;第2段t1~t2為恒頻過程;第3段t2~t3為降頻過程;第4段t3~t4為爬行過程;第5段t4~t5為停車過程。五段速度定位示意圖如圖2所示。
3 仿真模型與實驗平臺搭建
3.1 仿真模型搭建
該伺服系統的Matlab/Simulink仿真模型主要包括:電流滯環PWM逆變器模塊、PMSM模塊、Matlab功能函數模塊等。工作原理為:通過電機測量模塊獲得電機轉子的位置和速度參數,并將其反饋到Matlab功能函數模塊,經過該模塊和逆變模塊將連續正弦電流離散化,形成步進電流。反饋部分通過測量電機的實際電流值與給定電流相比較,用電流滯環模塊實現電機的自動控制,從而獲得良好的動態特性和定位特性。
3.2 實驗平臺搭建
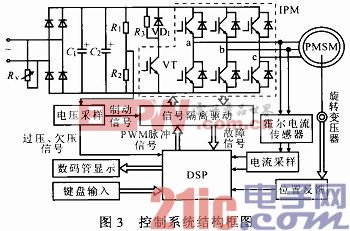
全數字驅動控制器由DSP控制部分和驅動功率放大部分組成。控制部分的核心采用DSP芯片TMS320F2407A;功率放大部分的核心模塊為智能功率模塊IPMP型M15RSH120。控制系統硬件結構如圖3所示。
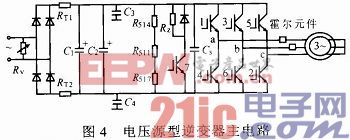
驅動控制器的主電路由整流電路、直流中間電路和逆變電路以及有關的輔助電路組成。主電路原理圖如圖4所示。此外,系統還設計了制動、過壓及欠壓等保護電路。










評論