基于Matlab的模糊PID控制研究

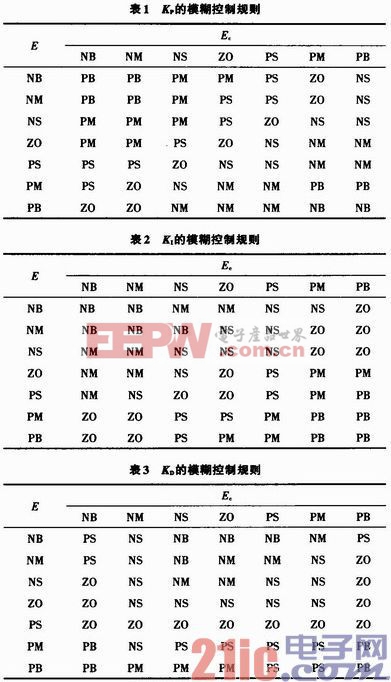
由此,可以建立KP,KI,KD的模糊控制規(guī)則,見表1~表3。本文引用地址:http://www.104case.com/article/159393.htm
1.4 模糊判決
把模糊量轉(zhuǎn)換為精確量的過程稱為清晰化,又稱為去模糊化或模糊判決。為了獲得準確的控制量,就要求模糊方法能夠很好的輸出隸屬函數(shù)的計算結(jié)果。輸出控制量U是一個模糊子集,它是反映控制語言取值的一種組合。應用模糊判決,即按加權平均法、隸屬度最大法或中位方法等原則,求出相應的控制量U。本系統(tǒng)采用工業(yè)控制中廣泛使用的加權平均法。該方法針對論域中的每個元素(i=1,2,…,n),以它作為待判決輸出模糊集合的隸屬度μ(i)的加權系數(shù),取輸出變量電壓加權平均值u為:
![]()
平均值u就是應用加權平均法為模糊集合求得的判決結(jié)果。最后用輸出量化因子乘以u來滿足控制要求,從而得到控制量的實際值。
2 系統(tǒng)仿真分析
2.1 仿真控制對象
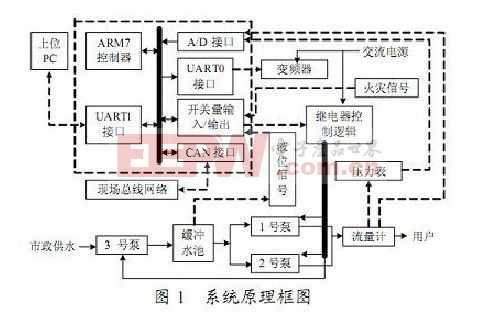
仿真控制模型的搭建,是驗證系統(tǒng)控制算法準確性的基礎。由于該模糊PID控制器用于液壓系統(tǒng)中,因此由系統(tǒng)框圖1可知,需求出各環(huán)節(jié)的傳遞函數(shù)。
(1)比例方向閥:根據(jù)測試結(jié)果,工程上將比例方向閥視為一個二階環(huán)節(jié)。其傳遞函數(shù)為

式中:Kq為比例方向閥的流量增益(單位:m3/(s·A));ωv為比例方向閥的相頻寬(單位:rad/s);δv為比例方向閥的阻尼比。
(2)液壓缸-負載環(huán)節(jié),在工程上視為一個積分與二階環(huán)節(jié)的組合,即其傳遞函數(shù)為:
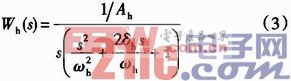
式中:Ah為液壓缸的有效作用面積(單位:m2);δh為液壓缸-負載質(zhì)量系統(tǒng)的阻尼比;ωh為液壓缸-負載質(zhì)量系統(tǒng)的固有頻率(單位:rad/s)。
由此,可以分析出閉環(huán)控制系統(tǒng)的開環(huán)傳遞函數(shù)為:

式中:Ka為比例放大器的增益(單位:A/V),可視為比例環(huán)節(jié);Kc為閉環(huán)系統(tǒng)的開環(huán)增益。
2.2 系統(tǒng)控制模型仿真
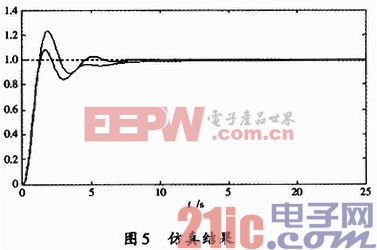
搭建好模型之后,利用Matlab/Simulink中的模糊控制工具箱建立模糊PID控制器與常規(guī)PID控制器,并分別搭建仿真模型進行仿真。根據(jù)控制要求以及參數(shù)整定值,得到模糊控制及常規(guī)控制的響應曲線,如圖5所示。
3 結(jié)論
以上仿真結(jié)果表明:控制器參數(shù)的變化對系統(tǒng)的控制性能有很大影響,要合理選取參數(shù),獲得最佳PID控制特性。采用模糊控制算法,系統(tǒng)響應速度快,穩(wěn)態(tài)性能好,具有較強的魯棒性,這是常規(guī)PID控制難以實現(xiàn)的,對于螺旋槳上的液壓控制系統(tǒng)有著較強的實際應用。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理

評論