地面動態跟蹤精度試驗中的坐標系變換研究

摘要:為了簡便有效地對光電產品進行檢測,在地面模擬飛機實際飛行環境下進行地面運動目標跟蹤精度試驗,提出了將目標的GPS位置信息轉換為產品坐標系下的坐標的變換方法,經過Matlab仿真計算,這種變換方法得到的目標基于產品的方位、俯仰角符合實際情況,適合計算跟蹤精度。
本文引用地址:http://www.104case.com/article/201610/308149.htm隨著航空技術的發展,光電產品在軍事領域的作用越來越廣泛,如何簡便而有效地檢測光電產品的性能是一個重要的課題。通常,紅外和電視產品的檢測是在飛機實際飛行情況下,通過機載光電吊艙進行檢測,這種檢測方法精度高,但是成本也很高。在地面模擬這種機載環境進行試驗可以大大降低成本,地面運動目標跟蹤精度試驗就是在地面試驗場中對紅外和電視產品探測、跟蹤性能的一種檢測手段。
要在地面模擬機載環境,需要利用轉臺來模擬飛機實際飛行時對產品跟蹤目標能力的干擾,將待測產品固定于轉臺上,對地面上運動目標進行跟蹤,在目標上裝有GPS,這樣可以實時得到目標的位置信息,跟蹤精度即為每個時刻目標實際運動過的角度與產品跟蹤目標所轉過的角度之差。所以,如何得到目標相對于產品實際運動過的角度是問題的關鍵,GPS產生的數據是目標每個時刻的經度、緯度、高度,需要將這些數據轉換為產品坐標系下的角度,這就需要進行不同參考坐標系的坐標變換。
1 坐標系定義
1. 1 地心直角坐標系
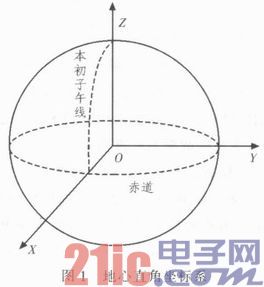
地心直角坐標系是一種慣性坐標系,坐標系的原點0選在地球質心。X軸指向地球本初子午線與赤道的交點;Z軸與地球的極軸重合,指向北極;Y軸與0XZ面垂直,Y軸與Z、X軸構成右手坐標系,如圖1所示。
1.2 地理坐標系
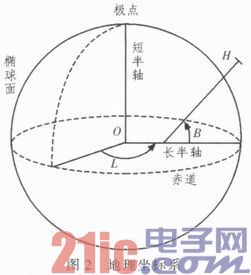
地理坐標系采用經度、緯度、大地高度表示空間點的位置。經度的定義為該空間點與參考橢球的自轉軸所在的面與參考橢球的本初子午面的夾角,緯度的定義為該空間點與參考橢球面的法線與赤道面的夾角,大地高度為空間點沿著參考橢球的法線方向到參考橢球面的距離。目標上的GPS產生的數據即為地理坐標系下的經度L、緯度B、高度H,如圖2所示。
1. 3 NED坐標系
NED是一種局部坐標系,其原點設在載體質心上。N為地理指北針方向;E為地球自轉切線方向;D為載體質心指向地心的方向。NED坐標系是一種局部穩定坐標系,不是一種嚴格的慣性坐標系。因為當運動平臺經過地球表面時,坐標系中的D軸將緩慢地改變它在空間的指向。然而,除了在北極附近外,這種轉動的影響可以忽略不計。因此,對運動平臺來說,NED坐標系是一個近似慣性坐標系。這種坐標系不僅特別適用于空載系統,而且也適用于地面或者艦載跟蹤系統。
在地面運動目標跟蹤精度試驗中,產品跟蹤目標轉過的角度就是基于以產品質心為原點的坐標系下的值。
2 坐標系變換
在已知目標與產品位置信息(GPS信息)的情況下,需要將目標的L,B,H轉換到坐標系下,直接進行坐標系的變換很難實現,這一轉換需要借助地心直角坐標系做為中間量,先把地理坐標系中的L,B,H轉換到地心直角坐標系下,然后再通過地心直角坐標系NED與坐標系的關系,轉換到NED坐標系。
2.1 地理坐標系與地心直角坐標系
GPS定位的數據為經度L、緯度B和高度H,則在地心直角坐標系中的坐標為:
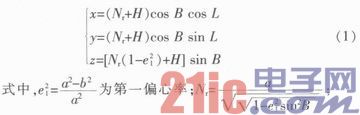
a為長半軸;b為短半軸。
由此,可以根據產品和目標的GPS信息(L0,B0,H0)、(L1,B1,H1)得到產品和目標在地心直角坐標系下的坐標,分別為X0=(x0,y0,z0),X1=(x1,y1,Z1)。
2.2 NED坐標系與地心直角坐標系
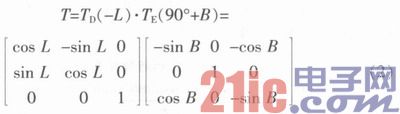
從NED坐標系到地心直角坐標系的轉換需要兩步,包括坐標旋轉與坐標平移。
1)坐標旋轉
從坐標系到地心直角坐標系的坐標旋轉關系,如圖3所示。
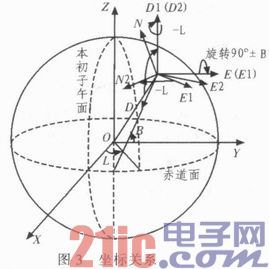
其旋轉矩陣為:
2)坐標平移
平移量即為產品在地心直角坐標系的坐標到地心直角坐標系原點的值,也就是產品位置相對于地心的值,為X0=(x0,y0,z0),由此可以得到目標在地心直角坐標系下的坐標:

其中,X=(x,y,z)為目標在以產品為原點的NED坐標系下的坐標。

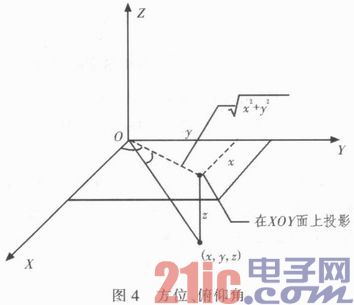
由(4)式得到X=(x,y,z),相對于產品觀測點,如圖4所示,目標在實際運動時轉過的方位角和俯仰角分別為:

求得目標實際轉過的角度之后,與產品跟蹤目標所轉過的方位、俯仰角之差即為所求的產品的跟蹤精度。
3 仿真分析
假設西安某地,產品的CPS數據信息為北緯39°45’,東經108°56’,高度為400 m,目標的初始位置在產品的正南方向600 m處,緯度為北緯39°44’40”,高度為300 m。
首先將經緯度換算成小數,則產品信息L0為108.93°,B0為39.75°,H0為400;目標信息L1為108.93°,B1為39.744°,H1為300。
采用Matlab進行仿真,目標經過坐標系變換后在產品坐標系下的坐標近似為(-666.21,0,100.03),求得方位角近似為0 rad,俯仰角為0.149 rad。
當目標沿著正南方向運動時,產生一組位置信息,經過Matlab計算,對應的坐標和方位、俯仰角如表1所示。
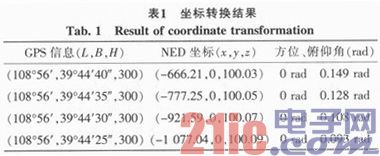
經過Matlab仿真計算的結果符合實際情況,可以用于地面運動目標動態跟蹤精度試驗中跟蹤精度的計算。
4 結論
本文通過對不同參考坐標系之間轉換關系的研究,得到了將目標的GPS位置信息轉換為目標基于產品坐標系下的方位、俯仰角的解算方法,從而可以與產品輸出的角度進行對比,得到光電產品對地面運動目標的動態跟蹤精度。使用這種方法可以在地面模擬機載環境,進行地面運動目標跟蹤精度的試驗,簡便有效。



評論