定理1考慮由系統(2)描述的線性系統關于性能指標(14)的LQR最優控制問題�����。假設系統完全可觀���、可控��,則系統的LQR最優控制率唯一存在����。其表示形式為:
結合式(13)得到系統的最優控制率:

3 控制系統在單連接機器人上的應用
單連接機器人的模型可以表示為:


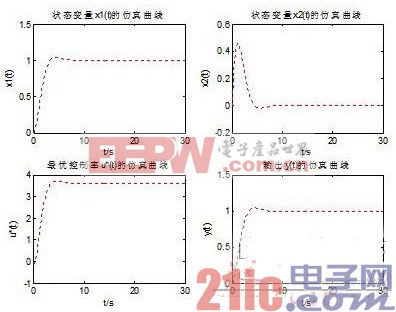
圖1 仿真曲線
4 結論
本文針對非線性系統�,研究了基于狀態反饋精確線性化最優控制器的設計問題�����,給出了關系度r等于系統階數n時的非線性系統精確最優控制器的設計方法�����,最后通過對單連接機器人非線性模型設計基于狀態反饋精確線性化的最優控制器��,仿真結果表明,本文設計的控制器效果非常好且易于實現�。











評論