反饋線性化最優控制在單連接機器人上的應用

1 引言
本文引用地址:http://www.104case.com/article/159387.htm非線性系統在現實世界中普遍存在,可以說絕大多數系統是非線性的,例如衛星的定位與姿態控制系統、機器人控制系統、精密數控機床控制系統等等,這些都不可能采用線性模型,因此研究非線性系統的最優控制問題有重要的理論及應用價值。因為對非線性系統的最優控制,根據極大值原理會導致求解一個非線性的兩點邊界問題。一般來說,該類問題的解析解往往是不存在的,所以目前對該課題的研究主要集中在其近似解的求解方面,比如Galerkin逐次逼近法,求解非線性HJB方程的級數展開法,求解狀態依賴的Riccati方程(Stata-DependentRiccatiEquation,SDRE)迭代解法,準線性化方法、梯度法等迭代方法,基于向量微分方程迭代的逐次逼近方法等等。近年來隨著以微分幾何為工具的精確線性化方法的發展,對部分非線性系統可以通過適當的非線性狀態變換和反饋變換,實現非線性系統的偽線性化,從而應用成熟的線性系統理論和方法。
本文針對非線性單連接機器人系統給出一種設計精確反饋線性化最優控制器的方法。首先,給出非線性單連接機器人的系統模型,并對最優控制問題進行描述;其次,通過微分同胚坐標變換,將非線性單連接機器人系統模型轉變為偽線性系統模型;再次,在此基礎上給出了在關系度r等于系統階數n的情況下基于二次型性能指標的最優控制器的設計方法;最后,通過求解Riccati方程得到系統最優控制率。
2 問題描述
考慮如下非線性系統的動態方程:

2.1 相關的微分幾何概念
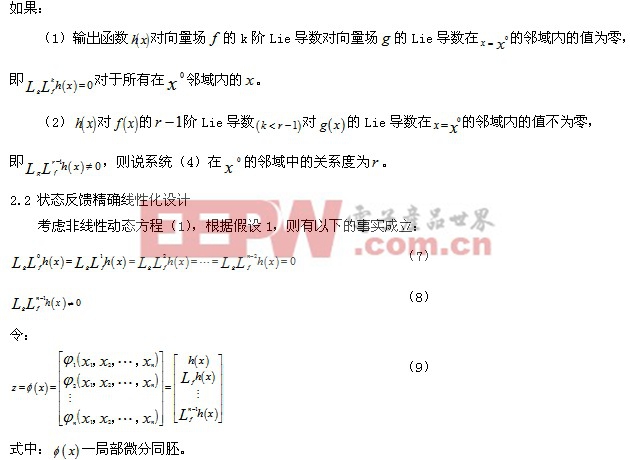
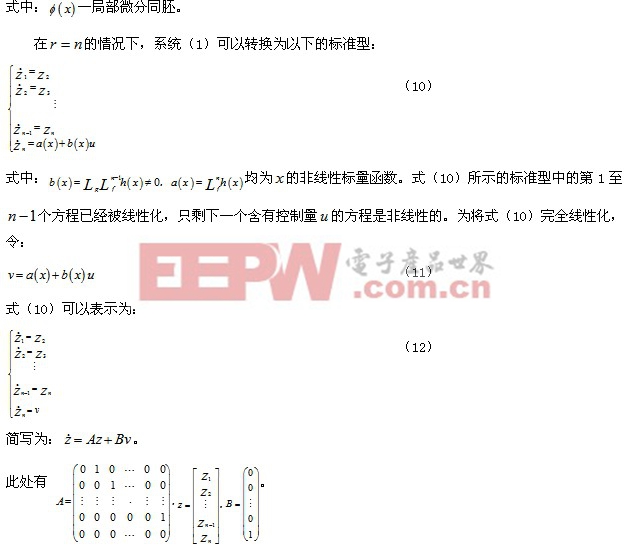
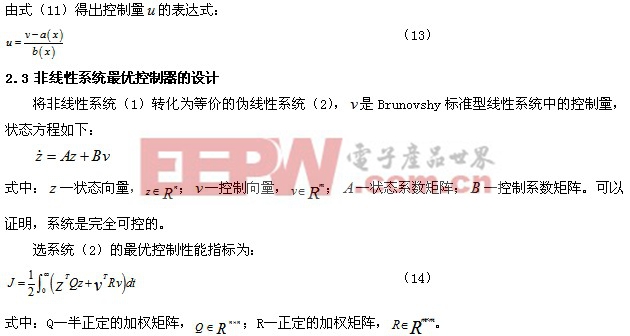
為了完整的說明狀態反饋精確線性化的設計原理,首先給出在推導中使用的一些相關的微分幾何概念,包括關系度r和Lie導數的概念。











評論