基于AGA的仿人機器人PID控制參數優化

1 引言
本文引用地址:http://www.104case.com/article/159385.htmPID控制原理簡單,適應性強,容易實現,是機器人控制的常用方法,PID控制系統設計的核心內容是如何確定其比例系數Kp、積分常數Ti和微分常數Td的最優解。控制參數的選定直接影響仿人機器人控制系統的響應速度、調節偏差的強度,以及控制系統的精度。
針對PID控制參數確定,主要有傳統參數整定方法以及結合智能算法對參數進行優化。傳統參數整定方法主要有試湊法、經驗數據法和擴充臨界比例度法。應用傳統參數整定方法有時并不能達到有效的控制效果。近年來,隨著智能算法的發展,模糊算法、神經網絡以及遺傳算法等都運用到PID參數優化當中。
其中遺傳算法是一種新型的、模擬生物進化機制的隨機化搜索和優化方法,具有并行計算、全局收斂、編碼操作等特點。由于其算法結構的開放性,易于與問題結合,便于運算,已成功的應用于求解多種復雜的優化問題,遺傳算法的特點使得將其運用于PID參數的優化是可行的。
針對仿人機器人PID控制參數優化存在的問題,結合智能算法的優勢,本文提出了一種自適應遺傳算法優化PID控制參數的方法,并在ADAMS環境下進行了仿真,得到較為滿意的結果,表明該方法是可行且有效的。
2 仿人機器人關節PID控制
2.1 常規PID控制原理
PID作為最早實用化的控制調節方法,是模擬控制系統中技術最成熟的一種調節方式。PID調節根據給定值與實際值的偏差進行比例調節,并且引入積分、微分環節提高控制系統的性能和品質,其基本控制流程如圖1。

圖1 PID控制過程示意圖
在PID控制中,Kp、Ti和Td這3個參數的選擇直接影響著PID控制的優劣,所以PID控制的設計關鍵問題始終是如何選擇這三個參數。常規的PID控制器由于受到參數設定不良、性能欠佳以及對運行工況適應性較差的影響,往往達不到理想的控制效果,從而使PID控制的應用受到限制。
遺傳算法是一種借鑒生物界自然選擇和自然遺傳機制的隨機化搜索方法,屬于直接搜索法,對適應度函數基本無限制,既不要求函數連續,也不要求函數可微,因而采用遺傳算法對PID參數進行調節是一種較好方法。但是,標準遺傳算法在線性方面具有一些不足之處,而自適應遺傳算法則是針對這些不足之處改進而來的。所以本文采用的是自適應遺傳算法來優化PID參數。
2.2 基于自適應遺傳算法PID參數優化
在仿人機器人行走仿真控制過程中,僅保證機器人行走過程的穩定性還不夠,為了能夠提高控制系統的響應速度與控制精度,必須尋找仿人機器人控制系統的最優PID控制參數以充分發揮控制系統的性能。基于遺傳算法的PID控制系統框圖,如圖2。
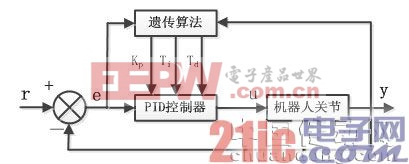
圖2 遺傳算法優化PID控制原理框圖
2.2.1 自適應遺傳算法
自適應遺傳算法針對標準遺傳算法進行如下改進:
1)根據適應度函數和進化代數自動調整個體的交叉率和變異率,AGA自適應交叉率、變異率按如下公式進行調整。
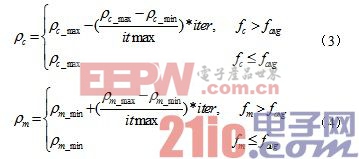

通過這種遺傳算子的調整,當種群個體適應度較差時,賦予種群個體交叉算子的最大值和變異算子的最小值,保證算法能在進化過程中進行全局搜索;當個體適應度值較大時(個體優良),隨迭代次數的增大,不斷的減小交叉算子、增大變異算子,從而提高算法的局部搜索能力。
2)最優個體保留策略與新個體優良判別。通過對交叉、變異后產生的新個體進行適應度值的計算,并與原來個體的適應度值進行比較,能夠有效選擇更為優良的個體。
經過對標準遺產算法改進后的自適應遺傳算法除了具有標準遺傳算法的優點外,還具有如下優點:
1) 避免過早收斂問題,提高全局搜索能力;
2) 避免算法收斂時產生振蕩,提高局部搜索能力;
3) 使遺傳算子具有方向性,提高遺傳算法的收斂性。

pid控制相關文章:pid控制原理
dc相關文章:dc是什么
pid控制器相關文章:pid控制器原理









評論