基于神經網絡的恒壓供水系統(tǒng)設計

1.3 數字式PID原理
因在連續(xù)控制系統(tǒng)中,PID控制具有典型的結構,參數整定方便,同時伴隨計算機技術的發(fā)展,在線測量速度加快,所以PID控制器被很廣泛應用。模擬控制系統(tǒng)中,PID的控制規(guī)律為:
K-比例系數;Ti-積分時間常數;Td-微分時間常數
輸出控制量取決于輸入與輸出的偏差、偏差積分和偏差微分3個因素,對連續(xù)的PID控制算法進行離散處理,如采樣周期T很小,則可得到離散PID表達式:
式中,u(k)為控制器在K時刻的輸出,Ki=Ip/Ti,Kd=KpTd,T為采樣周期,K為采樣序號,K=1,2,…,e(k-1)和e(k)分別為第(K-1)和第K時刻所得的偏差信號。上式可以看出,想要計算u(k),要本次與上次偏差信號e(k和e(k-1),而且還要在積分項中把歷次偏差信號e(j)進行相加,即求取累加信號,因此在具體實踐中需要占用很大的存儲空間,使用起來非常不方便。為了減少計算的工作量,節(jié)約存儲空間,經常采用增量式控制算法,上式,用u(k)-u(k-1),并進行一些變換,可得到增量式PID控制的表達式:
△u(k)=Kp(e(kT)-e(kT-T))+Kie(kT)+Kd(e(kT)-2e(kT-T)+e(kT-2T))
Kp-比例系數;Ti-調節(jié)器的積分時間;Td-調節(jié)器的微分時間
調節(jié)器改造成數字PID調節(jié)器對于工業(yè)控制過程來說,經常系統(tǒng)屬于非線性系統(tǒng),并且有時候系統(tǒng)的準確模型是無法可知的,同時,在實際的生產過程當中,經常受到系統(tǒng)參數不穩(wěn)定等多種因素的影響,系統(tǒng)調試比較繁瑣,并且性能欠佳,因此,人們尋求能夠自學習、自整定的技術,以適應復雜的控制系統(tǒng),而神經網絡技術的發(fā)展將這種設想變成現實。
神經網絡根據系統(tǒng)的運行狀態(tài)調節(jié)PID控制器的參數,從而達到控制系統(tǒng)性能的最優(yōu)化,使輸出層神經元的輸出狀態(tài)對應于PID控制器的3個可調整參數kp,ki,kd通過神經網絡的自學習,權系數調整,使神經網絡輸出對應于某種最優(yōu)控制規(guī)律下的PID控制器參數。
1.4 基于BP神經網絡的PID調節(jié)器整定原理
根據數字式PID的表達式可以看出,PID調節(jié)器參數調優(yōu)就是確定比例系數kp,積分時間常數ki,微分時間常數kd,使得系統(tǒng)滿足某些性能指標,因此,PID參數優(yōu)化問題就是(kp,ki,kd)三維參數的目標優(yōu)化問題。
根據系統(tǒng)需求,采用三層BP網絡,其結構如圖3所示。本文引用地址:http://www.104case.com/article/159319.htm

為反映輸入PID控制器信號的特性,其輸入層神經元個數選為3:x1(k)=e(k)為誤差量,![]() ,反映誤差的累計效果,類似連續(xù)系統(tǒng)中的積分效果,x3(k)=e(k)-e(k-1),反映誤差變化快慢,相當于連續(xù)系統(tǒng)中的微分效果。x1(k),x2(k)和x3(k)作為輸入,能夠比較全面的反映誤差量的狀態(tài),因此用它們來作為網絡輸入層的3個輸入量。輸出層輸出節(jié)點分別對應3個可調參數kp,ki,kd,故輸出層神經元個數為3。由于控制參數kp,ki,kd不能為負值,所以輸出層神經元的激發(fā)函數取非負的Sigmoid函數。
,反映誤差的累計效果,類似連續(xù)系統(tǒng)中的積分效果,x3(k)=e(k)-e(k-1),反映誤差變化快慢,相當于連續(xù)系統(tǒng)中的微分效果。x1(k),x2(k)和x3(k)作為輸入,能夠比較全面的反映誤差量的狀態(tài),因此用它們來作為網絡輸入層的3個輸入量。輸出層輸出節(jié)點分別對應3個可調參數kp,ki,kd,故輸出層神經元個數為3。由于控制參數kp,ki,kd不能為負值,所以輸出層神經元的激發(fā)函數取非負的Sigmoid函數。![]()
隱層的神經元個數可由以下經驗公式![]() 確定式中:n,q,m分別為輸入層、隱層和輸出層神經元個數,由上式計算可得,n+m取值在2~3之間,并且公式中f可取1~10,由于網絡節(jié)點數過多會增加計算量,個數太少則不能很好地逼近給定函數,綜合考慮,此處q取5隱層神經元的激發(fā)函數取正負對稱的Sigmoid函數。
確定式中:n,q,m分別為輸入層、隱層和輸出層神經元個數,由上式計算可得,n+m取值在2~3之間,并且公式中f可取1~10,由于網絡節(jié)點數過多會增加計算量,個數太少則不能很好地逼近給定函數,綜合考慮,此處q取5隱層神經元的激發(fā)函數取正負對稱的Sigmoid函數。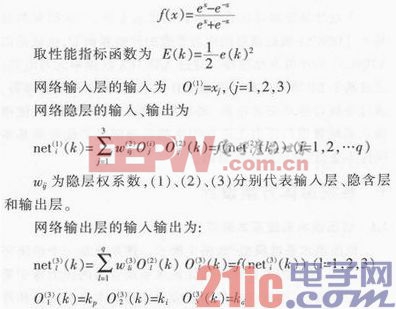
輸出層輸出節(jié)點分別對應3個可調參數kp,ki,kd。






評論