電動汽車用永磁同步電機驅(qū)動控制器設(shè)計

摘要:電動汽車驅(qū)動電機頻繁工作于啟動/停車、加/減速等復(fù)雜工況下,較工業(yè)用電機需要更寬的轉(zhuǎn)速范圍和更高的過載系數(shù),同時對控制器的開發(fā)提出了較大的挑戰(zhàn)。設(shè)計了一種適用于電動汽車的永磁同步電機(PMSM)控制器。給出了主電路的設(shè)計方法及驅(qū)動、檢測和保護單元的參考電路。軟件部分采用矢量控制,并根據(jù)實時性要求將任務(wù)劃分為4級。最后搭建平臺,對控制器的性能進行了測試。
關(guān)鍵詞:電動汽車;永磁同步電機;控制器
1 引言
當(dāng)前能源危機和環(huán)境污染問題推動了電動汽車的發(fā)展。電動汽車的關(guān)鍵技術(shù)包括汽車技術(shù)、電氣技術(shù)和電子技術(shù)等,其中電機驅(qū)動技術(shù)是電動汽車的核心。電機驅(qū)動系統(tǒng)的任務(wù)是將電能轉(zhuǎn)換為機械能使汽車前進。電動汽車驅(qū)動電機不同于工業(yè)用電機,通常要求能頻繁地啟動/停車、加速/減速、具有較寬的轉(zhuǎn)速范圍和較高的過載系數(shù),且要求驅(qū)動電機低速或爬坡時能提供高轉(zhuǎn)矩,高速行駛時則能輸出低轉(zhuǎn)矩。各國政府和主要汽車公司都對驅(qū)動電機控制器的研究和開發(fā)給予了高度的重視,并取得了一定的成就。
目前正在應(yīng)用或開發(fā)的電動汽車用電機主要有直流電機、無刷直流電機、PMSM、感應(yīng)電機和開關(guān)磁阻電機。PMSM以其體積小、重量輕、慣性低、響應(yīng)快、轉(zhuǎn)矩密度高、效率高、啟動轉(zhuǎn)矩高和功率因數(shù)高的特點在電動汽車領(lǐng)域應(yīng)用較為廣泛。此處將設(shè)計一種適用于電動汽車的PMSM控制器。
2 控制器硬件設(shè)計
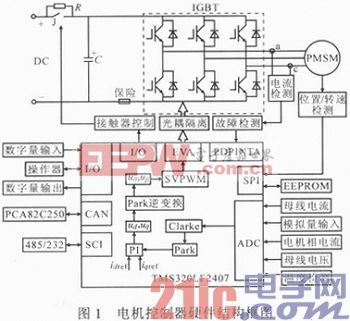
驅(qū)動電機控制器采用全數(shù)字化結(jié)構(gòu),功率部分包括:主電路;IGBT驅(qū)動電路及開關(guān)電源電路。控制部分包括:DSP控制電路;電壓、電流、溫度、轉(zhuǎn)速的檢測電路、故障與保護電路;開關(guān)量輸入輸出電路;模擬量輸入輸出電路、485/CAN通信電路和操作器電路,其硬件結(jié)構(gòu)如圖1所示。
2.1 控制器主電路設(shè)計
控制器設(shè)計之初,需確定控制器負載、供電電源和使用環(huán)境的要求:①負載參數(shù)要求:負載額定功率Pn、額定電壓un、額定電流in和過載倍數(shù)kg等;②電源參數(shù)要求:額定電壓及變化范圍;③其他要求:工作環(huán)境條件、結(jié)構(gòu)尺寸限制等。根據(jù)某電動汽車的要求,此處研制的控制器性能指標為:額定功率55 kW;額定轉(zhuǎn)速4 500 r·min-1;峰值功率82.5 kW;峰值功率運行時間5 min;電動方式轉(zhuǎn)速范圍0~9 000 r·min-1;發(fā)電方式轉(zhuǎn)速范圍800~9 000 r·min-1;基速峰值及額定功率時的效率89%~93%;工作電壓范圍405~583.2 V;扭矩控制精度為:額定扭矩以下:±5 N·m,額定扭矩以上:5%;扭矩控制響應(yīng)時間小于100 ms;速度控制響應(yīng)時間為在200 ms時進入±50 r·min-1誤差之內(nèi);速度控制精度:負載從0~100%變化,速度變化小于±1%;扭矩和速度控制模式的轉(zhuǎn)換時間20 ms。
2.1.1 控制器容量選擇
由于電機控制器傳給驅(qū)動電機的是脈動電流,其脈動值比工頻供電時電流要大,因此須將電機控制器的容量留有適當(dāng)?shù)脑A俊W冾l器應(yīng)滿足:
![]()
式中:Scn為電機控制器的額定容量;Pn,η,cosφ分別為電機輸出功率、效率、功率因數(shù),η=0.85,cosφ=0.8;K為電流波形的修正系數(shù),PWM方式取1.05~1.1。
2.1.2 IGBT電壓選擇
IGWT電壓應(yīng)能承受母線峰值電壓,當(dāng)ICBT關(guān)斷時峰值電壓可表示為:
![]()
式中:Udcmax為母線最高電壓;α為過電壓保護系數(shù),取α=1.15;β為安全系數(shù),一般取β=1.1;Ldi/dt為母線電感引起的尖峰電壓,這里取100 V。
通過對式(2)進行計算得到Ucesp=858.7 V,這樣應(yīng)選擇Uces=1 200V的元件。
2.1.3 IGBT電流規(guī)格選擇
IGBT電流的選擇,需保證電機峰值電流在IGBT的安全工作區(qū)內(nèi)。IGBT的額定電流應(yīng)滿足:
![]()
式中:S為電機控制器容量,此處S=114kVA;kg=1.5;kjw為考慮結(jié)溫的電流降額系數(shù),此處kjw=1.4;U0為驅(qū)動電機線電壓,![]()
由式(3)可得,Ic應(yīng)大于508.94 A,根據(jù)IGBT的等級應(yīng)選擇Ic=600 A的元件。








評論