基于CAN通信的卡車語音報警器的設計

位定時主要用于定義CAN總線通信的速率,對同一總線上的各個節點應定義同一種通信速率,否則無法進行通信聯系。CAN控制器的總線工作頻率計算公式如下:本文引用地址:http://www.104case.com/article/157686.htm

式中:BRP為系統預分頻因子,它在TSEG1域中的取值范圍為0~63;TSEG1、TSEG2的值由位定時寄存器編程決定,并滿足1≤TSEG1≤7, 2≤TSEG2≤15。報警器中位定時的設置,定義通信頻率為250KB/s。設定DSC=BRP=1,TSEG1+TSEG2=5,系統晶振頻率為 8MHz,即XTAL=8MHz,CAN通信頻率由上式計算得到250KB/s。
最后位定時設置結果為:BRP=1,TSEG2=2,TSEG1=3。

該卡車語音報警系統的設計目標是:成本低;功能強大;適用于日常應用;能夠應用于各類車輛。該系統可實現如下功能:利用CAN網絡實現對卡車故障碼的接收;二,通過識別CAN系統傳過來的信號,并對信號進行處理得到相應的語音提示,通過與語音芯片的連接實現相應故障的語音播放報警。
該語音報警系統以摩托羅拉公司的MC68HC908GZ16處理器為核心,并利用其豐富的接口擴展使用了語音播放、CAN通信接口等外圍模塊,使產品設計更加人性化。MC68HC908GZ16處理器具有如下優點:
1.豐富的硬件資源
MC68HC908GZ16為閃存型MCU,內部擁有16K的FLASH存儲空間和1K的RAM存儲空間。內部擁有鎖相環電路,能夠在使用低速晶振的情況下使總線頻率最高達到8MHz。同時擁有多達37個通用I/O口,可以方便地與其他外圍設備相連接。
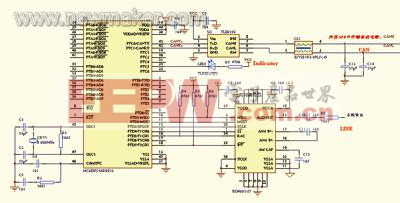
內部集成了CAN控制器,利用CAN通信具有很強的抗干擾這一特點,保證了產品能夠在惡劣環境條件下高效而穩定地運行。










評論