船載通信天線控制系統的穩定設計

依據完全不變性原理,當(1+F(S)K2W2)ωf,即F(s)=-1/K2W2時,實現對船搖擾動的完全隔離,即滿足這個條件時,不論擾動量ωf為多大,對輸出無影響。可是,速度回路K2W2中含有積分環節、慣性環節、二階環節,如果要實現完全的不變性,必然F(S)中要具有許多個微分環節,這樣F(S)的輸出將充滿噪聲,使系統根本無法工作。但是實現局部的不變性是可能的。即用低階微分代替高階微分,并使其系數滿足某種條件,從而滿足系統精度的要求。
實際使用中,合理選擇前饋補償系數,使前饋回路最大化的消除當前擾動,在此基礎上結合環路的跟隨能力,有效的消除視軸的偏差,實現高精度跟蹤。因此,前饋回路起到粗調節的作用,而位置跟蹤回路則可稱為精調節。
2.3 工程應用
2.3.1 安裝與測量
采用3個速率陀螺測量出因船體搖擺引起的附加在方位軸、橫傾軸和俯仰軸方向的速度,用于開環補償。
俯仰陀螺安裝在方位轉臺上,敏感軸與天線的俯仰軸平行,陀螺隨方位軸運動,敏感不到方位軸的旋轉、俯仰軸的旋轉、船體的航向速率等,它敏感的是船體的橫搖、縱搖速率,如式(2)所示,可直接對俯仰軸進行開環前饋補償。
分析橫傾軸的擾動(式(3))和方位軸的擾動(式(4)),無法用一只陀螺直接測量到,可用間接的方法獲得。用2只陀螺分別測量cosAωy+s-inAωp和ωh,根據俯仰角E用數學的方法得到式(3)和式(4)。這樣,測量ωh分量的速率陀螺安裝在方位底座(不隨方位軸轉動),其敏感軸與方位軸平行,輸出主要為船體的航向速率信息。測量cosAωy+sinAωp分量的速率陀螺安裝在方位轉盤上(隨方位軸轉動),其敏感軸與橫傾軸平行。
2.3.2 測試與分析
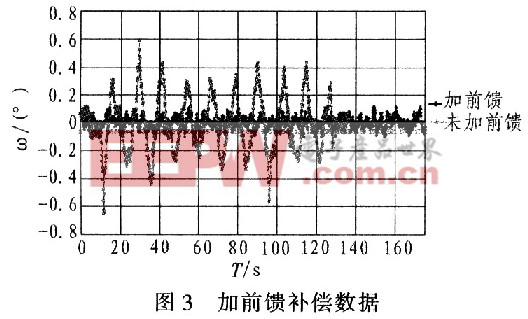
某船載三軸天線控制系統采用抗擾動設計。在海上進行搖擺實驗,在典型海況參數(搖擺振幅±6°,搖擺周期12s)下。天線指向衛星自跟蹤,轉動船的航向,使船升搖時測量俯仰軸的船搖隔離度。這時天線方位角轉至90°或270°;測量橫傾軸的船搖隔離度,使天線方位角轉至0°或180°。隔離度測試結果如圖3所示。圖中,曲線系列1表示加前饋跟蹤數據;曲線系列2表示無前饋跟蹤數據。測試結果為:船搖隔離度為46.4 dB;跟蹤精度為0.031°。由以上數據分析,可以得出開環補償方案完全滿足系統設計的性能指標要求。本文引用地址:http://www.104case.com/article/157162.htm
3 結束語
前饋補償并未改變原閉環系統的極點和閉環零點。因此,不會影響系統的伺服帶寬和穩定性。工程使用時融合了前饋補償和反饋控制的應用,在保證功能、性能的同時,簡化系統、提高設備的可靠性和使用壽命,實際使用效果顯著。






評論