船載通信天線控制系統的穩定設計

由圖l(a)可得:
當A=0°時,縱搖速度為ωp=0,只有橫搖量ωy;當A=90°時,橫搖速度為ωy=0,只有縱搖量ωp。在天線主動驅動和載體擾動的共同作用下,天線各軸的總的旋轉速度為:
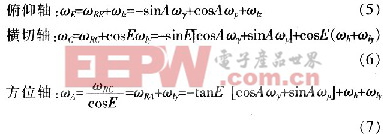
式(2)~式(4)是船體三維擾動在天線三軸上的反映,伺服控制系統可以采用開環補償消除其對天線跟蹤的影響。式(5)~式(7)是天線三軸在慣性空間總的轉動信息,伺服控制系統可以采用閉環方式消除其對天線跟蹤的影響。因此,設法正確測量出這些信息,并采取合適的控制模式,抑制擾動使天線快速、穩定跟蹤目標是伺服系統抗擾動設計的核心。
2 抗擾動設計
船搖擾動是作為一種干擾信號引入伺服系統,穩定控制的原理就是檢測這種干擾,采取閉環或開環方式降低或消除其影響。擾動隔離方法主要有:速率陀螺前饋補償、速率陀螺反饋控制、復合控制等方法。由于陀螺閉環控制本質上是誤差調整方式。陀螺測量出的是綜合擾動信息,無法區分擾動信息分量和隨動信息分量。所以陀螺環路在對擾動信息進行抑制的同時,也對天線的主動運動進行動態抑制,降低了系
統的響應速度,同時使系統的穩定性變差。相對而言,前饋補償是開環調整方式,測量出的就是擾動信息,把此信息加入速度環的輸入端,使天線軸以與船搖相反的速度轉動,起到補償作用。同時,由于不改變跟蹤環路的結構和參數,使系統的帶寬不受影響、環路的穩定性好。
2.1 補償原理
前饋補償的方法是使天線向與擾動相反的方向轉動,以克服擾動的影響。依據上述三維擾動在天線三軸上的反映,合理設計陀螺的安裝位置,使之感應出船搖引起的天線三軸相對于慣性空間的運動速度,把這種運動速度作為對天線的擾動,加入速度環的輸入端,使天線軸轉動與船搖方向相反、大小相等的速度量,起到抑制作用。
2.2 控制實現
天線跟蹤設備的三軸穩定控制采用測速機作為速度反饋,編碼器作為位置反饋,并將船搖擾動經速率陀螺檢測前饋于速度回路。工作原理框圖如圖2所示。本文引用地址:http://www.104case.com/article/157162.htm
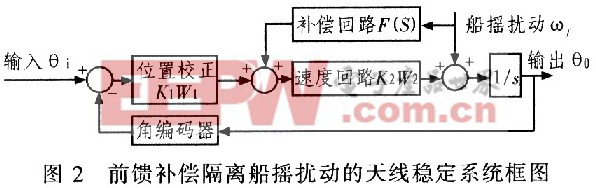
圖2中,K1W1為位置回路校正控制傳遞函數;K2W2為速度回路閉環傳遞函數,F(S)為補償通道傳遞函數,系統傳遞函數為:

由式(8)可知:回路跟隨能力是由![]() 項決定,而船搖擾動消除能力由
項決定,而船搖擾動消除能力由![]() 項決定。從第二項可以看出消除船搖擾動的電機驅動角速度量由兩部分組成,一是慣性空間中視軸被擾動的當前角速度(目標靜止)。二是由補償回路給出的當前時刻擾動量通過速度回路給出的電機驅動角速度。
項決定。從第二項可以看出消除船搖擾動的電機驅動角速度量由兩部分組成,一是慣性空間中視軸被擾動的當前角速度(目標靜止)。二是由補償回路給出的當前時刻擾動量通過速度回路給出的電機驅動角速度。






評論