船載通信天線控制系統的穩定設計

為了完成遠洋航天測控和通信業務,大型精密跟蹤天線要安裝在測控和通信測量船上。由于船體受海浪影響,而發生隨機性搖擺(橫搖、縱搖、偏航)會使天線視軸晃動,容易造成窄波束天線跟蹤性能下降,甚至造成丟失目標。為準確跟蹤目標,減小載體運動給天線跟蹤帶來的擾動,需建立一套抗擾動穩定系統,使天線輸出視軸隔離船體擾動而穩定在慣性空間坐標系。保證系統的跟蹤能力和跟蹤性能的要求。
為了有效實現抗擾動功能,傳統的方案上需要同時采用多模式補償,利用至少6個速率陀螺檢測船體的三維擾動信息和天線主動的旋轉信息,根據天線三軸(方位軸、俯仰軸、橫切軸)結構,結合前饋開環補償和反饋閉環補償,實現對擾動的隔離。方案設計復雜、陀螺使用量大且冗余度不夠。
1 船體三維擾動對三軸天線視軸的影響
三軸天線系統(橫切軸C、方位軸A、俯仰軸E),是在傳統的A-E型座架基礎上,在俯仰軸上疊加與之垂直的橫切軸,橫切軸垂直于電軸。當俯仰角E=0°時,橫切軸與方位軸重合;當俯仰角E=90°時,橫切軸與方位軸垂直。
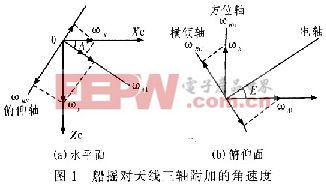
當船體以角速度矢量ωz=(ωpωyωh)表示擾動。其中:ωy為船橫搖速度,ωp為船縱搖速度,ωh為船航向速度。船搖參數的變化轉換到橫傾軸、方位軸、俯仰軸的速度分量,如圖1所示。設ωRE為船搖附加的方位速度,ωRC為船搖附加的橫傾速度,ωRE為船搖附加的俯仰速度甲板坐標系:OXc為船艏艉線,艏為正,OYc為垂直甲板平面,向上為正,OZc按右手規確定。






評論