基于ZigBee的航標遙測終端

3.3.2 遙控功能模塊
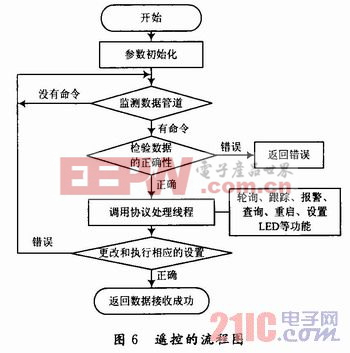
此模塊主要負責對控制中心發(fā)來的命令進行解析,并對其做出相應的處理。控制中心的數(shù)據(jù)通過通信模塊發(fā)送給終端之后,在協(xié)議處理線程中進行控制命令的解析。當數(shù)據(jù)校驗正確后,終端根據(jù)命令進行處理并返回一個遙控成功的信息。遙控命令主要包括輪巡時間間隔設置、跟蹤時間間隔設置、報警時間間隔設置、遙控航標燈、終端重啟等,其具體流程圖如圖6所示。本文引用地址:http://www.104case.com/article/156591.htm
4 調(diào)試結果與結論
根據(jù)上述軟硬件設計和調(diào)試結果表明,該終端能實現(xiàn)航標燈數(shù)據(jù)和GPS數(shù)據(jù)的采集;能正確、穩(wěn)定地以ZigBee或者CDMA通信方式實現(xiàn)與服務器之間的數(shù)據(jù)傳輸,并且雙模通信模塊能自動進行切換;能通過遙控命令對終端進行設置,對航標燈進行遙控;并且可以穩(wěn)定的運行。由此可見,在S3C2410處理器和ARM-Linux操作系統(tǒng)平臺下,采用基于ZigBee無線網(wǎng)絡的航標遙測終端開發(fā),可以方便地實現(xiàn)航標遙測終端功能;采用雙模通信,可以克服其中一種斷線時數(shù)據(jù)丟失的缺陷。當然,由于ZigBee模塊本身的通信距離有限,當航標間距較遠時,需要通過增加功率放大器來增大其通信距離,以滿足航標間距較遠的應用場景。












評論