基于ZigBee的航標遙測終端

3.2 通信功能模塊設計
終端的通信具有ZigBee,CDMA兩種通信方式,由通信處理線程實現。具體完成ZigBee,CDMA模塊的初始化、數據發送與接收、智能切換通信方式以及模塊工作狀態的監測等功能。
通信線程的處理機制是利用信號的異步通知機制,通過安裝信號處理函數,當某一通信方式出現異常時就發送信號并攜帶相關的信息,從而觸發信號處理函數進入中斷處理異常信息,并根據信息來選擇重建當前通信或建立另一種通信方式或重啟系統。在此主要介紹雙模通信中的ZigBee通信方式。
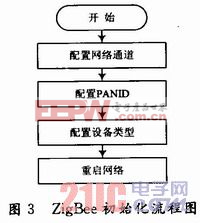
當選擇ZigBee通信方式時,必須對ZigBee進行初始化,其初始化流程圖如圖3所示。本文引用地址:http://www.104case.com/article/156591.htm
部分初始化程序如下: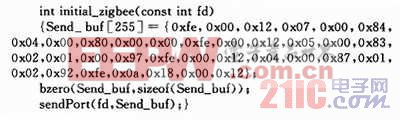
fd表示的是連接ZigBee/CDMA與ARM的串口的文件句柄;sendPort相當于UNIX中的write()函數,即將Send_buf中的數據寫入到串口。
因為在終端中用的ZigBee通信模塊有其固定的幀格式,所以需要將采集到的數據進行打包,然后才能傳輸,利用一個函數send_prepare(int mode,unsignedchar send_buf[512],int length)實現數據的打包。其中,mode表示的是ZigBee和CDMA中的一種模式;send_buf[]表示需要發送的有效數據,此函數的主要功能是將有效數據加入到ZigBee和CDMA能識別的幀格式中。然后調用發送函數sendPort(fd_com,send _buf)將數據通過ZigBee或CDMA發送到控制中心。當數據發送到控制中心,控制中心模塊會給終端一個應答。通過對此幀的解析,可以看出發送是否成功。例如,在ZigBee通信方式中,狀態/標志位為00時表示發送成功,否則表示發送失敗。
3.3 遙測遙控功能模塊設計
3.3.1 遙測功能模塊
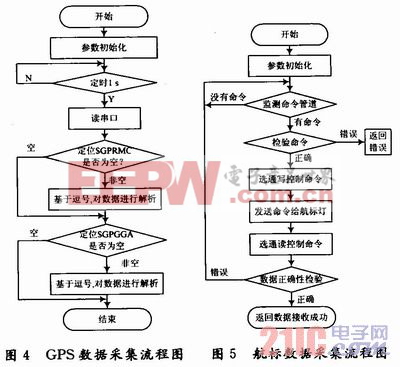
遙測包括數據采集與數據傳輸兩部分。數據采集包括航標燈數據和GPS數據的采集。航標燈是一種請求-應答式的設備,要采集航標燈數據就必須通過處理器或是控制中心發送采集命令。在終端上采用定時的方式,當設置時間到時,終端就會自動發送遙測命令給航標燈,當航標燈收到數據并通過CRC檢驗后,航標燈將其實時的數據發送給處理器,然后通過通信模塊發送到控制中心。GPS數據是通過讀取GPS-OEM板自動輸出的NMEA-0183格式數據獲得的,在程序中采用中斷方式接收,每1 s接收一次數據。GPS和航標燈數據采集流程圖如圖4,圖5所示。
當采用ZigBee通信方式時,由于ZigBee模塊發送數據的最大長度為63個字節,所以將終端發給服務器的有效數據分為兩幀發送,在兩幀之間加上一個標志0x21,有助于服務器端解析終端數據。












評論