一種基于RFID的智能交通控制設計

1 引言
本文引用地址:http://www.104case.com/article/156590.htm為了緩解交通壓力,降低修路資金投入,減少車輛延誤,節能減排,設計智能交通控制是建設資源節約型社會的必然選擇。本文設計了一種基于RFID的智能交通控制,采用RFID 技術檢測交叉路口附近的車輛,智能交通控制信號機根據采集到的車輛信息,選擇合適的路口控制模式自適應地控制車輛通行時間,從而保證車輛通行質量。
2 路口控制模式
傳統的路口控制模式是定時控制,路*通信號燈的延時時間是固定的,不能根據車輛的流量自適應地動態調節延時時間,從而造成車輛延誤時間長及不必要的擁塞等情況。先進的路口控制模式有模糊控制、綠波帶模式、夜間模式和急停模式。模糊控制模式根據隨機的車輛流量智能完成模糊增減交通信號控制時間。綠波帶模式在單向車輛高峰期時將各個路口間紅綠燈起始點亮時間延宕一定量來保證車輛一路暢行。夜間控制模式在夜晚車輛流量為零負荷的狀態使用,僅使用黃燈警示開車司機,減少能源和時間的消耗。急停模式為緊急車輛開辟通行空間,在緊急車輛方向開啟綠燈,別的方向開啟紅燈。本設計提出在不同的時段采用不同的控制模式,在9: 00- 11: 30,14: 30- 17: 30和20: 30- 24: 00時段采用模糊控制模式; 在5: 30- 9: 00,11: 30- 14: 30和17: 30- 20: 30時段采用綠波帶模式; 在0: 00- 5: 30時段采用夜間控制模式; 在檢測到緊急車輛時采用急停控制模式。選擇多種控制模式可以實現交通控制的合理化,從實際上緩解交通路口的壓力。具體的時段設置可以根據具體的區域或車輛流量由信號機重設或修改。
3 智能交通控制設計
3. 1 智能交通控制信號機設
3 .1 .1 信號機硬件設計:
國內信號機主要分為2類: 一類采用8 /16位單片機作為處理器,功能簡單、方案單一,難以實現區域交通協調控制,不能適應現代化交通控制的要求; 另一類是基于工控機或PC104,功能雖然強大,但由于工控機和PC104都是按通用計算機標準設計,并非專門針對信號機應用設計,硬件結構復雜,成本高。國外的信號機(如西門子公司的2070和美國的EAGLE )起步早,水平高,但不適用于中國混合交通模式,且價格昂貴,操作不方便。本文選擇基于ARM 核的32位嵌入式R ISC 處理器S3C44B0X進行智能交通信號機硬件設計,以達到采集與處理交通流數據、通信聯網以及區域協調控制的設計目的,信號機硬件結構如圖1所示。
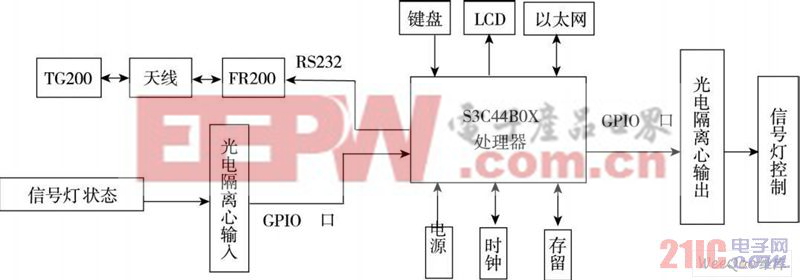
圖1 信號機硬件結構











評論