基于Modbus RTU通信協(xié)議的伺服電機聯(lián)動控制系統(tǒng)

摘要:針對改進傳統(tǒng)的復(fù)雜伺服電機聯(lián)動控制系統(tǒng)的目的,提出一種新的設(shè)計方案,采用Modbus RTU通信協(xié)議,簡化了系統(tǒng)復(fù)雜度,降低了成本,并且通過自行設(shè)計接口轉(zhuǎn)換電路,提高了通用性;另外,該系統(tǒng)通過改進優(yōu)化的軟件設(shè)計,能實現(xiàn)系統(tǒng)的連續(xù)運行,解決了定位數(shù)據(jù)運行模式只能定位不能連續(xù)運行的問題。先介紹總的系統(tǒng)設(shè)計,然后介紹Modbus RTU協(xié)議以及具體實現(xiàn)方法,最后以LabView編程為例,介紹上位機軟件系統(tǒng)的實現(xiàn)過程。
關(guān)鍵詞:Modbus RTU;通信協(xié)議;伺服電機;LabView
工業(yè)控制已從單機控制走向集中監(jiān)控、集散控制,如今已進入網(wǎng)絡(luò)時代,工業(yè)控制器連網(wǎng)也為網(wǎng)絡(luò)管理提供了方便。Modbus就是工業(yè)控制器的網(wǎng)絡(luò)協(xié)議中的一種,通過此協(xié)議,控制器相互之間、控制器經(jīng)由網(wǎng)絡(luò)(例如以太網(wǎng))和其它設(shè)備之間可以通信。基于上述原理,文中設(shè)計了一套伺服電機聯(lián)動控制系統(tǒng),采用Modbus RTU通信協(xié)議進行數(shù)據(jù)通信,達到能夠同時對2臺電機聯(lián)動控制的目的。
1 系統(tǒng)構(gòu)成以及原理
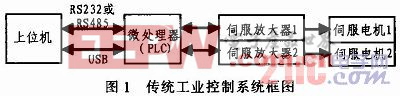
在工業(yè)控制過程中,電機是控制系統(tǒng)一個重要組成部分。一般通過微處理器控制電機繼而達到實現(xiàn)自動控制的目的。而上位機通過串行或者并行通信協(xié)議控制微處理器,來實現(xiàn)遠程控制。具體框圖如圖1所示。
文中提出了一種新的伺服電機聯(lián)動控制系統(tǒng)的設(shè)計方案,采用Modbus RTU協(xié)議,使上位機(PC)直接可以和伺服放大器進行通信,其框圖如圖2所示。本設(shè)計上位機采用一般PC即可,最好帶RS485接口。伺服放大器選用富士公司RYH201F5-VV2,伺服電機選用富士公司GYS201D5-RC2。由于系統(tǒng)設(shè)計過程中節(jié)省了微處理器,所以不僅在數(shù)值處理運算和數(shù)據(jù)傳送上運行速度快,實時性強,而且簡化了系統(tǒng)復(fù)雜度,降低了成本。

由于有的PC不自帶RS485接口,因此上位機不能利用Modbus通信協(xié)議來控制伺服放大器。雖然市場沒有專門接口轉(zhuǎn)換電路,但是由于一般上位機(PC或者工控機等)都自帶USB接口,自己根據(jù)Modbus協(xié)議和實驗室現(xiàn)有器件,自行設(shè)計接口轉(zhuǎn)換電路,接口圖如圖3所示。

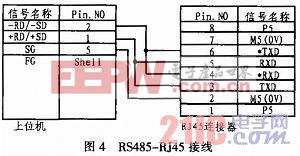
其中USB轉(zhuǎn)RS232和RS232轉(zhuǎn)RS485可以在市場買到。RS485-RJ45具體接線如圖4所示。

伺服電機相關(guān)文章:伺服電機工作原理








評論