基于機器視覺的嵌入式高速圖像通信系統設計

3.2 CPLD控制程序設計
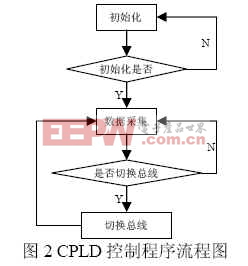
CPLD的作用是產生 CCD、A/D及 DSP視頻端口的同步驅動脈沖。每次采樣時, CPLD將從 SAA7111A接收到一幀圖像數據保存到 SRAM中,此時 DSP等待;采樣結束后, DSP與 CPLD進行總線切換,分別連接到與上次不同的 SRAM上,DSP開始讀取數據,CPLD開始采集數據。每當 DSP和 CPLD 都完成各自的任務時,就進行總線切換 ,交換連接的 SRAM。此過程中由 CPLD控制程序的流程如圖 2所示。本文引用地址:http://www.104case.com/article/152321.htm
3.3 USB的固件程序及驅動程序
固件程序在該系統中其主要功能是實現 USB芯片的初始化和配置;控制 USB芯片接收并處理 USB驅動程序請求;控制芯片接收控制程序的控制指令。固件程序首先初始化所有的內部狀態變量,調用用戶初始化函數 TD-Init(),初始化 USB總線設備接口為非配置狀態,并打開中斷。當完成上面的任務后,固件程序就開始重新枚舉設備直到在端點收到 SETUP包為止。一旦 CY7C68013收到 SETUP包,固件程序就開始進行任務分配。固件程序流程圖如圖 3所示。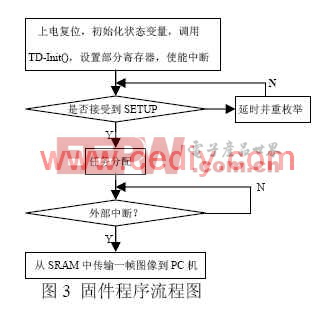
3.4 主機應用應用程序
在 PC機端,用 Visual C++ 6.0編寫客戶應用程序,應用程序通過 USB接收原始的奇數場和偶數場圖像數據,待接收完奇數場和偶數場圖像數據后,應用程序把它們組成完整的一幀圖像,并且把該幀圖像數據存儲到硬盤上,然后把這幀圖像轉化成 BMP格式的圖像存儲在硬盤上,同時以 BMP的形式顯示圖像。
4 結論
從總體來看,該系統以嵌入式設備為核心平臺,在此平臺上完成了機器視覺、圖像實時采集、數據傳輸 3個子系統的無縫連接集成開發。使得本系統只需較少的成本,擁有監測終端,就能完成主動智能監測、用戶遠程現場監控等功能。此外,本系統可針對不同需求,在添加各類相應的傳感器后,將可運用到包括消防、車輛防盜以及工業控制等很多實用領域。
本文作者創新點 :介紹了 DSP與 CPLD協同控制的高速圖像通信系統的設計,采用高速 USB2.0作為圖像傳輸的接口,完成了機器視覺、圖像實時采集、數據傳輸 3個子系統的無縫連接集成開發。








評論