基于ARM9的嵌入式仿人機器人傳感器系統(tǒng)設(shè)計

4 實驗驗證
4.1 加表實驗
由于當(dāng)機器人傾斜的時候,重力加速度會在加速度兩軸上產(chǎn)生分量,這時加速度值為Ax=gsin α和Ay=gsinβ。在加速度計水平放置的時候,Ax=gsin α,由于條件的限制,很難使加速度計達到絕對水平。在α=0附近,sin α變化幅度大,這樣會影響標(biāo)定效果,而在a=π/2附近,sin α變化幅度較小。為了得到較好的加速度計標(biāo)定效果,采用了豎直標(biāo)定的方法,即將PCB電路板用細線懸掛起來,分別得到g和-g時的值,通過計算就可得到加速度在0g時的值。由于ADXL202的輸出含有高斯白噪聲,應(yīng)用直接采來的數(shù)據(jù)會有較大的誤差,因而需要對采集來的數(shù)據(jù)進行處理后再加以應(yīng)用。
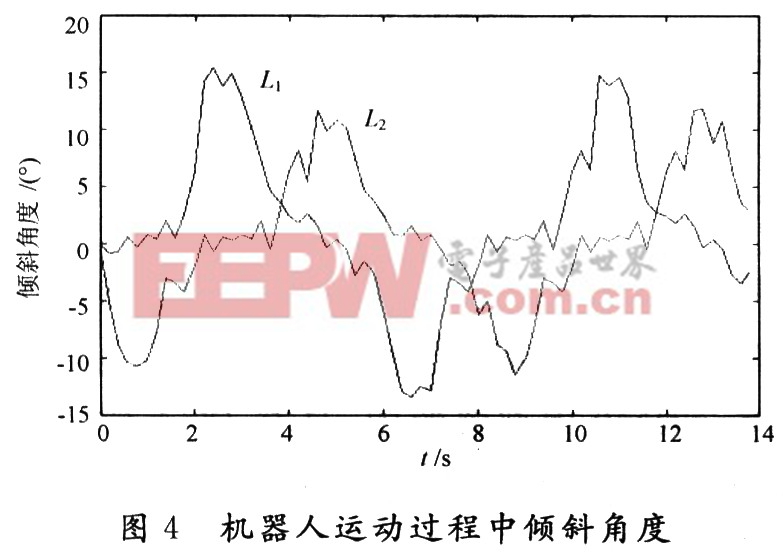
通過平均值濾波可降低噪聲的影響,假設(shè)Xi為直接采集來的數(shù)據(jù),Yi為平均值濾波后的數(shù)據(jù),Yi=(∑xi)/n,由概率論知識可知,EYi=EXi,DYi=DXi/n。從中可看出平均值濾波的效果與平均點數(shù)n有關(guān),n越大,濾波效果越好。考慮到機器人的運動情況,可取n=15,即噪聲的方差變?yōu)樵瓉淼?/15。圖4是DF-1機器人在運動過程中獲取的傾斜角度值。其中L1表示了機器人的俯仰角度,L2表示了機器人的橫滾角度。本文引用地址:http://www.104case.com/article/152295.htm
由于DF-1仿人機器人體型較小,運動較為緩慢,在障礙距離測量上,能夠?qū)Ω? m以內(nèi)的障礙就可滿足應(yīng)用要求。在2 m以內(nèi)不同距離上放置平面障礙,利用超聲波和紅外傳感器測量這些距離信息,測得的距離與實際距離如表1所示。

從表中可以看出,超聲波測量距離的誤差在2%以內(nèi),紅外傳感器測量距離的誤差在4%以內(nèi),可以滿足DF-1仿人機器人的應(yīng)用要求。
5 結(jié)語
本文針對DF-1機器人要實現(xiàn)的功能,基于ARM9微處理器設(shè)計了傳感器系統(tǒng)。試驗結(jié)果證明,本傳感器系統(tǒng)基本可以滿足機器人的功能需求,具有一定的應(yīng)用價值。具備傳感器系統(tǒng)的DF-1機器人對外界環(huán)境和自身狀態(tài)有了一定的感知能力,為上位機進行動作決策提供可靠的依據(jù),提高了機器人的智能性。








評論