基于ARM9的嵌入式仿人機器人傳感器系統(tǒng)設(shè)計

2.1 加速度計傳感器
判定機器人姿態(tài)的傳感器有陀螺儀和加速度計等傳感器,由于陀螺成本較高,而DF-1機器人在運動變化上較為緩慢,故本文采用了成本較低的加速度計來感知機器人的姿態(tài)。加速度計是物體運動測試中的重要元件,它的輸出與物體的加速度成比例。傳感器系統(tǒng)所采用加速度計的具體型號為AD公司生產(chǎn)的雙軸加速度計ADXL202。ADXL202具有兩種輸出,一種是從XFILT和YFILT引腳輸出模擬信號;另一種是直接從XOUT和YOUT引腳輸出經(jīng)調(diào)制后的DCM信號。在具體使用中,選用了加速度計的DCM信號輸出,這樣就可省去使用模擬信號需要引入的A/D轉(zhuǎn)換環(huán)節(jié),簡化了電路設(shè)計難度。
2.2 超聲傳感器
用來測距的傳感器主要有紅外傳感器、超聲波傳感器、激光測距儀等,為了能在測量距離的同時判斷出物體的大致形狀,應(yīng)設(shè)計成多傳感器測距系統(tǒng)。考慮到機器人的安裝空間以及成本問題,主要選用了超聲波傳感器進行距離的測量。
超聲波傳感器主要用來完成機器人到周圍障礙距離信息的測量,超聲波在測距過程中存在多次反射問題,即超聲波遇到障礙物體時,沒有沿著原路返回發(fā)射接收點,而是經(jīng)過多次反射后才返回發(fā)射接收點,這樣測量到的距離信息不再真實,情況嚴重時會“丟失”目標。本文選用DEVANTECH公司生產(chǎn)的SFR05。SFR05的體積小,信號穩(wěn)定,便于在機器人中安裝,而且SFR05的測量距離為1 cm~4 m,在最小測量距離上可認為該傳感器不存在盲區(qū)。
2.3 紅外傳感器
為了彌補超聲傳感器在測距中多次反射的問題,在超聲波相對應(yīng)的位置安裝了三個紅外測距傳感器。當超聲波傳感器測量的距離遠遠大于同方向上紅外傳感器測量的距離時,可以據(jù)此推斷出超聲波已經(jīng)進行了多次反射,并用紅外傳感器測量的距離信息來取代超聲波傳感器的信息。本文使用的紅外傳感器為SHARP公司生產(chǎn)的GP2D12,可測距離為10~80 cm。GP2D12加上電源就可工作,輸出電壓為0.3~2.8 V。GP2D12傳感器在測量距離時受外界光強度、物體外表反射率及物體顏色的影響較小。本文引用地址:http://www.104case.com/article/152295.htm
3 軟件實現(xiàn)
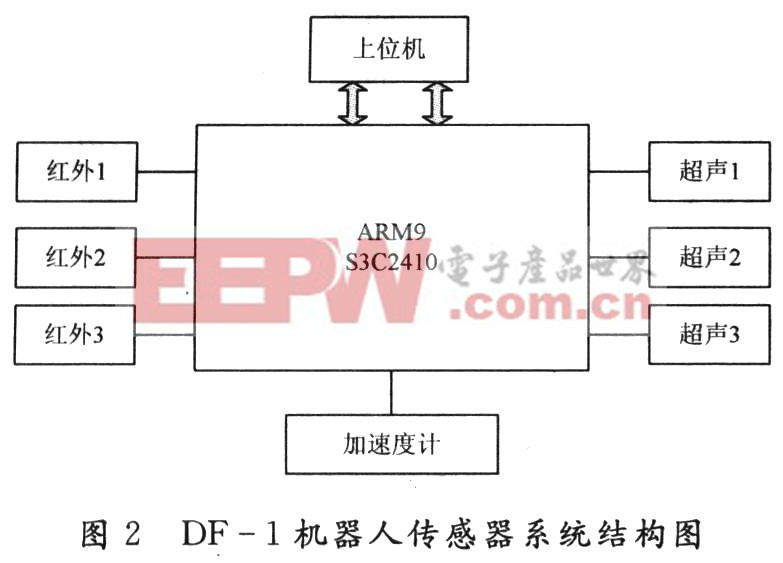
傳感器系統(tǒng)數(shù)據(jù)采集與處理單元采用ARM9微處理器,主要完成以下功能:實現(xiàn)對加速度計的控制和加速度的測量,并根據(jù)加速度值,計算機器人的傾角;實現(xiàn)對超聲波傳感器的控制,完成距離信息的計算;實現(xiàn)對紅外傳感器的控制,完成距離信息的獲取;對獲得的傾角、超聲波測距和紅外測距數(shù)據(jù),按照規(guī)定的通信協(xié)議發(fā)送給上位機,程序主流程如圖3所示。
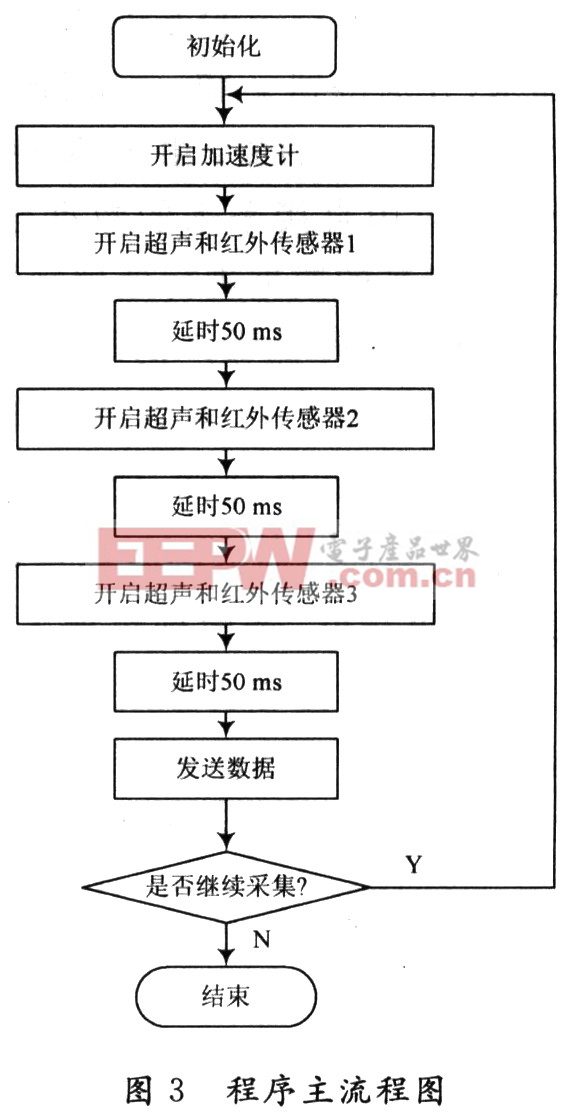
程序首先要初始化,主要包括系統(tǒng)時鐘的選擇、管腳的分配、中斷優(yōu)先級、定時器時鐘和工作方式的選定等。在ARM9內(nèi)部資源中,具有PCA定時器單元和A/D單元,這些方便了對本傳感器系統(tǒng)的數(shù)據(jù)采集。防止超聲波傳感器之間發(fā)生串擾,對超聲波傳感器采用輪流測量的方式。由于超聲波傳感器的工作周期為50 ms,當工作時間少于50 ms時,超聲波傳感器會誤認為下次測量發(fā)送超聲波產(chǎn)生的干擾為本次的回波,造成距離測量上的失真,而紅外傳感器建立電壓的時間只需要5 ms,所以在編程上,利用定時器0產(chǎn)生50 ms延遲,依次對3對超聲波傳感器和紅外傳感器進行數(shù)據(jù)采集。由于加速度傳感器和紅外、超聲傳感器之間是獨立的,而且數(shù)量只有一個,它的采集過程只依賴于PCA捕捉模塊捕捉到的時刻,所以加速度計信息的采集和預(yù)處理工作可貫穿于150 ms以內(nèi)。在完成對傳感器系統(tǒng)的信息采集和預(yù)處理后,還要將獲取的數(shù)據(jù)發(fā)送給上位機,為上位機的決策提供必要的數(shù)據(jù)。
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)







評論