基于TMS320DM355處理器的出租車安全監控系統

3.2 存儲模塊
DM355 提供了DDR2 及NAND FLASH 的擴展支持,通過外擴存儲器可以極大提高系統的存儲容量及處理性能。系統外擴512M字節NAND FLASH 固態存儲器,用來存儲UBL、U-boot、內核及根文件系統,以支持系統上電自啟動,還可以實現采集圖片的暫時存儲;當系統上電后,位于Flash 上的U-boot、內核將被搬移到RAM 內運行,通過外擴128M字節的DDR2 SDRAM,提高了系統運行速度及數據吞吐量,實現了系統性能的提升。
3.3 圖像傳感器
系統采用了低功耗、高分辨率,高性價比的CMOS 圖像傳感器OV5620,這是OmniVision公司的第二代五百萬成像芯片,光學規格為1/2.5 英寸,最大輸出分辨率為2592×1944,并支持鏡頭黑點校正,邊緣增強及噪聲減弱功能。采用此圖像傳感器采集現場2560×1632的高清圖像,為報警處理及事件取證提供更豐富的信息。
4 監控終端軟件設計
系統在嵌入式Linux 操作系統的基礎上,通過驅動接口各個硬件設備,編寫應用程序實現系統功能。系統啟動方式選擇為NAND FLASH 啟動,在Flash 上存儲Boot Loader、內核及文件。系統上電首先運行Boot Loader,完成一些必須的初始化操作,然后將Linux 內核搬運到DDR 中,并將控制權交給內核。內核啟動后,通過掛載文件系統的方式,將Flash上的文件系統掛載成為根文件系統,此時即可運行用戶應用程序。
本設計采用 C/S 結構實現系統功能,以一臺電腦或者監控設備運行監控軟件,作為服務器,而下位機采取隨機向監控主機發送數據的方式,實現實時監控與控制。
本設計將整個應用程序實現為3個進程:capture 進程、dir_send 進程及gps 進程。capture進程主要完成圖像采集設備OV5620 的初始化,中斷初始化,并接收外部中斷,以進行圖像數據的采集,JPEG 壓縮及本地存儲;dir_send 進程主要完成capture 進程采集數據的發送,實現定時檢測功能,一旦發現有圖片文件生成時,即檢測該圖片是否完整,如果完整則在網絡良好的情況下發送至監控中心,一旦監控中心接收成功,則刪除該圖片文件,以充分利用本地有限的存儲資源;gps 進程通過串口接收GPS 模塊的定位信息,并將信息及時通過無線網絡發送至監控中心,以實現監控中心對車輛的行駛實時監控與記錄。各進程流程圖如圖2所示:
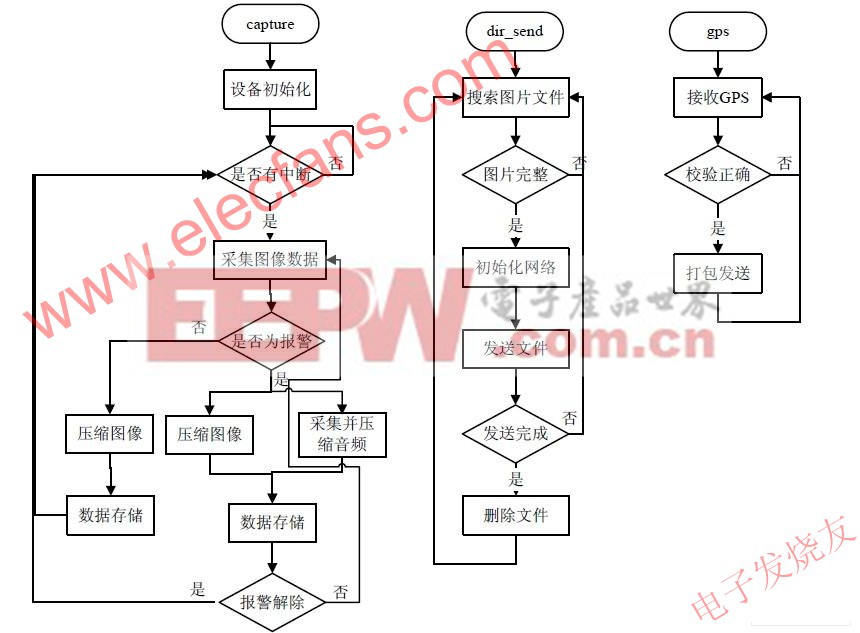
圖 2 應用程序流程圖
通過設計3個進程,完全實現了系統功能,經實際驗證,系統穩定可靠。
總結:
本文介紹了基于 TI 公司TMS320DM355 處理器的出租車安全監控系統,從系統架構,車載監控終端硬件設計及應用軟件三個方面對整個系統進行了介紹。該系統通過在中斷信號的觸發下,采集車內圖片信息,GPS 位置信息實現對車輛行駛狀態及車內狀況的監控。該系統通過實車環境檢測,信息傳輸穩定,系統響應及時可靠。該系統可在不改變硬件設計的情況下升級為視頻監控系統,但與此同時無線傳輸鏈路也應升級為速度更高的3G 等方式。










評論