基于DSP控制的數(shù)字式雙向DC/DC變換器的實現(xiàn)

(d)vab波形
圖3 原邊對副邊放電S1~S4驅(qū)動信號與vab
移相控制時門極脈沖如圖3(c)所示,S4門極脈沖比S1門極脈沖滯后一個角度θ,vab如圖3(d)所示。因此,可以通過控制滯后角度θ的大小來控制輸出電壓。在數(shù)字控制器中可以用軟件設(shè)定滯后角度θ來控制輸出電壓,即可以通過移相控制使輸出電壓可調(diào)。
1.2 副邊對原邊充電
此時,如圖3所示,只要把S5~S8的驅(qū)動信號與S1~S4的驅(qū)動信號互換,vab則由vcd替換即可,同樣存在滿調(diào)制和移相控制兩種情況。但是,通常情況下充電要求恒流充電,因此,也可以通過移相控制來滿足此要求。原副邊的工作過程剛好與放電時相反。此處不再贅述。
2 雙向DC/DC數(shù)字化控制的軟件實現(xiàn)
雙向DC/DC變換器,可以實現(xiàn)能量的雙向傳輸。通常正向放電要求輸出電壓可調(diào),而反向充電過程通常要求充電電流恒定不變。通過對S3和S2的移相控制可以實現(xiàn)副邊輸出電壓的可調(diào)要求,同樣,副邊對原邊進行充電時,可以通過移相控制使得充電電流恒定。
主程序流程圖和ADC的中斷服務(wù)程序流程圖分別如圖4和圖5所示,在軟件進行移相控制實現(xiàn)輸出電壓可調(diào)的同時,軟件實現(xiàn)電壓環(huán)的調(diào)節(jié),使輸出穩(wěn)壓。由于TMS320LF2407內(nèi)部帶有ADC模塊,因此,輸出電壓值通過電壓LEM采樣反饋給DSP的ADC模塊,在AD中斷程序里讀取采樣值,然后進行數(shù)字濾波和數(shù)字PI調(diào)節(jié),使輸出穩(wěn)壓。
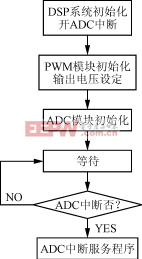
圖4 主程序流程圖
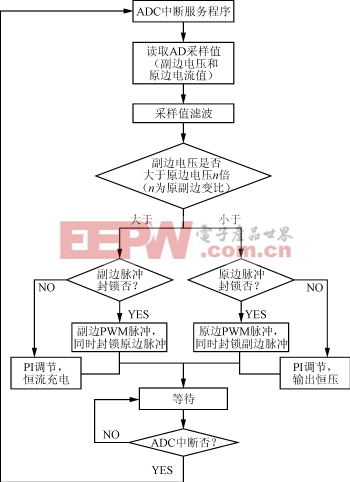
圖5 ADC中斷服務(wù)程序流程圖
一般充電要求是恒流充電,所以,充電時反饋用電流環(huán),對原邊的充電電流進行PI調(diào)節(jié),實現(xiàn)恒流充電。本實驗中原邊供電電源為蓄電池,由于其電壓為12V,真正要實現(xiàn)電流反向,使原邊的二極管導(dǎo)通,考慮到變壓器原副邊的變比為1:2,副邊電壓必須超過24V時才能實現(xiàn)電流反向,故必須得對副邊電壓采樣。對副邊電壓的采樣,不僅實現(xiàn)了PI調(diào)節(jié),同時也用來控制雙向工作方式的切換。在雙向DC/DC的負載端電壓上升到一定程度時可以使能量倒流,對原邊進行充電,使副邊多余的能量能夠反饋給原邊。
電壓采樣和電流采樣是實現(xiàn)輸出電壓可調(diào)及穩(wěn)壓和充電電流恒定的關(guān)鍵,在DSP的中斷服務(wù)程序中對采樣值進行數(shù)字濾波和PI調(diào)節(jié)。程序根據(jù)給定輸出電壓參考值和充電電流參考值進行PI調(diào)節(jié),當(dāng)原邊輸入電壓變動時,副邊輸出電壓穩(wěn)定在給定值;而當(dāng)副邊負載電壓有波動時也可以根據(jù)給定電流參考來調(diào)節(jié)相移大小,控制原邊充電電流值。數(shù)字式PI調(diào)節(jié)采用的是增量式PI控制,其系統(tǒng)框圖如圖6所示。由于DSP具有強大的計算能力以及EV(Event Manager)模塊,則PWM信號可以方便地得到,因此,硬件部分可以大大簡化,控制電路部分可以全部省略而由軟件來代替,即軟件實現(xiàn)PI計算控制以及PWM信號的產(chǎn)生。但是,考慮到DSP的安全性問題,必須有光耦隔離。
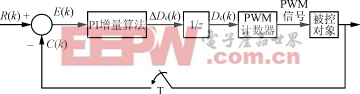
圖6 增量式PI控制系統(tǒng)框圖
3 實驗結(jié)果
根據(jù)上述主電路工作原理分析,為證實數(shù)字化控制方法的有效性,制作了一臺實驗樣機,開關(guān)頻率為50kHz。對于圖2所示的主電路結(jié)構(gòu),所選用元器件參數(shù)如下:S1~S8選用IRF840,Vin為蓄電池(12V,4A·h/20h,充電使用);C1為100μF,C2為100μF;IRF840前級用TLP250驅(qū)動,控制器用TMS320LF2407A,光耦采用6N137;電壓采樣LEM為電流型的LV25-P,原邊額定電流10mA,副邊對應(yīng)電流25mA,此輸入和輸出對應(yīng)精度為±0.9%;電流采樣LEM為HDC-040G系列霍爾電流傳感器,其輸出電壓2.5V±1V,精度為±1%。
圖7(a)所示為副邊輸出10V時的實驗波形,當(dāng)輸入電壓分別為10V,40V,50V時,S2和S4的驅(qū)動波形分別如圖7(b),(c), (d)所示,可見當(dāng)輸出電壓給定時,而輸入電壓可變,可以通過前文所提到的增量式數(shù)字PI控制實現(xiàn)移相控制,使輸出穩(wěn)壓得以實現(xiàn)。圖8為副邊輸出20V時的輸出電壓波形和各主開關(guān)的驅(qū)動波形。
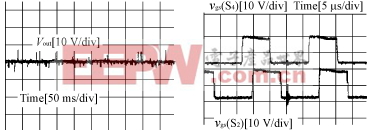
(a) 10V輸出波形 (b) 10V輸入時的驅(qū)動波形
脈寬調(diào)制相關(guān)文章:脈寬調(diào)制原理 數(shù)字濾波器相關(guān)文章:數(shù)字濾波器原理






評論