基于SOC的定位監控設計

3 系統軟件設計
3.1 定位終端的軟件實現
該定位終端的軟件采用模塊化的設計方法,其模塊主要包括系統的初始化、GPS定位信息的處理、GPRS定位信息的發送。GPS定位信息的處理以串口UART1的中斷方式執行,GPRS定位信息的發送以循環方式執行。
系統的初始化包括系統時鐘初始化、端口初始化、串口初始化和GPRS的啟動。系統時鐘初始化采用外部晶振22.118 4 MHz,不分頻;端口初始化配置交叉開關,給URAT0,URAT1分配端口引腳;串口初始化設置串口的工作方式,通過GPS和GPRS的波特率,計算定時器的值。
3.2 上位機的軟件實現
監控中心是將GIS軟件MapInfo嵌入到VC6中進行開發,這使得MapInfo中的地圖窗口可以合并到VC中,從而利用VC在數據庫方面的強大功能,也很好地利用了Maplnfo對地理信息直觀形象地處理優勢。通過調用MapX的接口函數,實現電子地圖的一些基本功能。編寫程序將定位終端和監控中心連接起來,將定位終端獲取的定位信息顯示在電子地圖上。
4 實驗結果
本文將基于SoC技術的定位監控用于實際定位過程中,對定位監控進行了測試,定位區域選擇為武漢科技大學校本部圖書館前的馬路。實驗結果如圖3所示。本文引用地址:http://www.104case.com/article/150860.htm
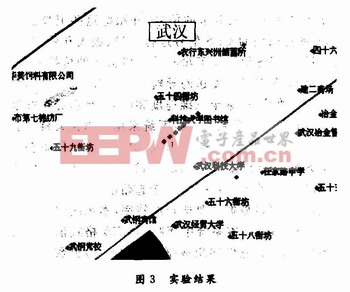
由圖3可以看出,系統運行良好,滿足定位監控的定位要求。
5 結語
本文基于先進的SoC技術實現了GPS/GPRS定位監控的設計,詳細說明了該系統的硬件和軟件結構,通過核心控制器C8051F021對GPS模塊和GPRS模塊進行雙模塊控制。用VC++進行MapX二次開發,將MapInfo中的地圖窗口合并到VC中,利用了VC在數據庫方面的強大功能,也很好地利用了Maplnfo對地理信息直觀形象的處理優勢。實驗表明,該系統基于SoC技術的單片機C8051F021作為核心控制器,優化了系統性能,節約了成本,縮短了開發周期,性能良好。












評論