基于DSP/BIOS 的TI DSP 應(yīng)用程序框架設(shè)計(jì)

3.1 主從通信方式
我們在DSP 的存儲空間中定義了兩個寄存器:DSP 運(yùn)行控制寄存器(DSP_CNTL)和DSP 運(yùn)行狀態(tài)寄存器(DSP_STAT)。在DSP_CNTL 中可以定義一系列控制字段用來表示外部主機(jī)對DSP 的各種控制操作,而在DSP_STAT 中可以定義一些與DSP_CNTL 相對應(yīng)的描述DSP 當(dāng)前運(yùn)行狀態(tài)的字段信息。GPP 通過合理地設(shè)置DSP_CNTL 以命令DSP 執(zhí)行相應(yīng)的操作,而DSP 在響應(yīng)了CPU 的命令后會設(shè)置好DSP_STAT 以告知CPU 目前DSP 的運(yùn)行情況。
另外,為了便于 DSP 與主機(jī)進(jìn)行數(shù)據(jù)交換,ERF5 在DSP 的存儲空間中開辟了兩塊專用于在DSP 與GPP 之間進(jìn)行數(shù)據(jù)交換的緩沖區(qū),并在DSP 運(yùn)行狀態(tài)寄存器DSP_STAT 中定義一個緩沖區(qū)標(biāo)志位PPFLG 以告知主機(jī)當(dāng)前它所能訪問的乒乓緩沖區(qū)是“乒”或是“乓”,使得主機(jī)和DSP 之間的數(shù)據(jù)交互能夠彼此相對獨(dú)立地進(jìn)行。
3.2 任務(wù)實(shí)現(xiàn)模型
在明確了主機(jī)與DSP 的通信方式以后,下面需要解決的就是如何在應(yīng)用程序框架中給出合理的任務(wù)實(shí)現(xiàn)模型使它既能支持主機(jī)對DSP 的有效控制又能盡可能地減小DSP/BIOS的任務(wù)調(diào)度開銷。這里以我們的實(shí)際項(xiàng)目為例來闡述任務(wù)的實(shí)現(xiàn)模型。在我們的H.264 混合編解碼系統(tǒng)中,DM642 需要運(yùn)行三個相互獨(dú)立的任務(wù):視頻編碼任務(wù)、視頻解碼任務(wù)和視頻直通任務(wù),在任意時刻,這三個任務(wù)線程的核心處理過程運(yùn)行與否完全受GPP 控制。首先,出于對系統(tǒng)性能的考慮,我們都以靜態(tài)配置的方式在DSP/BIOS 中定義這3 個任務(wù),這樣在系統(tǒng)運(yùn)行時不需要花費(fèi)由于任務(wù)動態(tài)創(chuàng)建所帶來的不可避免的性能開銷。顯然這3 個任務(wù)應(yīng)該具有同等優(yōu)先級,否則,由于DSP/BIOS 實(shí)時內(nèi)核的搶占性特征將使得某些高優(yōu)先級的任務(wù)始終搶占那些低優(yōu)先級任務(wù)的執(zhí)行權(quán)即使GPP 在某些時刻并沒有啟動那些高優(yōu)先級的任務(wù)。此外,由于DSP/BIOS 周期性地調(diào)度系統(tǒng)中所有處于就緒狀態(tài)下的任務(wù),所以必須使每個任務(wù)中判斷其主體處理過程是否執(zhí)行的邏輯和任務(wù)切換邏輯盡可能短小,因?yàn)檫@段代碼在系統(tǒng)執(zhí)行時將被頻繁地調(diào)用。另外需要注意的是應(yīng)該使用TSK_sleep(…)函數(shù)來實(shí)現(xiàn)任務(wù)切換邏輯以使當(dāng)前沒有被GPP 命令執(zhí)行的任務(wù)被阻塞一段時間(該時間間隔應(yīng)該至少是系統(tǒng)中各個周期性任務(wù)的最大執(zhí)行周期),否則DSP/BIOS 任務(wù)調(diào)度器會頻繁調(diào)度該任務(wù)以至于影響到其它任務(wù)的正常執(zhí)行。下面以視頻直通任務(wù)為例給出其任務(wù)執(zhí)行流程圖如圖3所示。
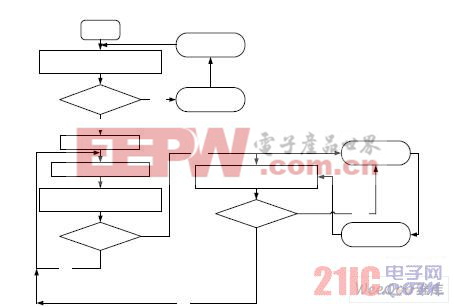
圖3 視頻直通任務(wù)的執(zhí)行流程圖










評論