基于ARM9處理器的ZigBee工業以太網網關設計


軟件執行流程圖如圖4 所示,底層的硬件初始化包括時鐘的設置、GPIO 的管理、串口的配置、以太網接口MII 的配置以及PHY 芯片的設置等,然后CC2520 的初始化配置無線通信模塊符合ZigBee 協議標準,CC2520 初始化設置后,模塊即可以實現透明串口傳輸,與ARM 處理器進行數據交互。為適應短幀實時和確定性通信發展趨勢,以太網通信采用UDP/IP 協議啟動linux 內核多任務調度管理,進行串口數據的收發、UDP 的接收與發送以及嵌入式WebServer 等任務。
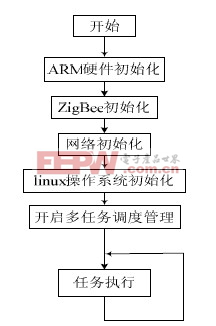
圖4 軟件執行流程
TCP/IP 協議使用MAC 地址進行硬件地址的識別并使用ARP 協議進行硬件地址到IP 地址的解析因此必須完成ZigBee 到ARP 地址的轉換,才能保證正常通訊ZigBee 中每個節點都有自己的MAC 地址,格式由64 位長地址和16 位短地址組成文章設計實現了ZigBee協議中適配層和ARP,完成ZigBee 中MAC 地址到以太網IP 地址的映射工作流程圖如圖5 所示當網關接收到一個正常發往本地IP 的以太網數據包后,經過協議判斷送往上層UDP(TCP)處理,最后到網關的應用程序處理網關應用程序經過分析判斷,確定需要轉發給ZigBee 網絡中的哪個節點,經過ZigBee 端的ARP 地址解析出對應的ZigBee 中的節點MAC地址,將相應的數據包送至該節點,完成一次數據通訊。
同理,當ZigBee 端收到數據包后,通過同樣的解析將數據包送至對應節點或設備通過內嵌的WebServer 用戶可實現ZigBee 節點的實時訪問、修改、組態等。
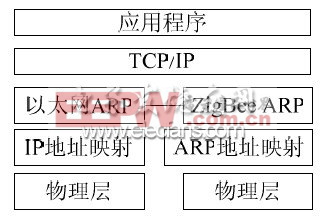
圖5 網關協議工作框圖
4 結束語
在網關中內嵌WebServer,可通過以太網隨時訪問或修改現場儀表的數據,實現遠程控制,遠程診斷等該產品有效的解決了工業現場短距離ZigBee 無線通訊連接以太網的問題,以全新的方式向物聯網靠攏.











評論