基于視覺與超聲技術機器人自動識別抓取系統設計

視覺傳感器是指具有從一整幅圖像捕獲光線的數發千計像素的能力,圖像的清晰和細膩程度常用分辨率來衡量,以像素數量表示,邦納工程公司提供的部分視覺傳感器能夠瞧捕獲130萬像素,因此,無論距離目標數米或數厘米元,傳感器都能quot;看到quot;細膩的目標圖像,視覺傳感器應用其本要素是掌握如何應用視覺傳感器的兩個關鍵點的照明和軟件工具。
本文引用地址:http://www.104case.com/article/149928.htm超聲波傳感器是利用超聲波的特性研制而成的傳感器。超聲波是一種振動頻率高于聲波的機械波,由換能晶片在電壓的激勵下發生振動產生的,它具有頻率高、波長短、繞射現象小,特別是方向性好、能夠成為射線而定向傳播等特點。
1 系統原理與結構
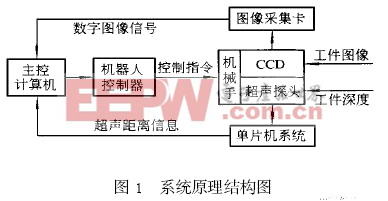
系統由機械手、CCD 視覺傳感器和超聲波傳感器及相應的信號處理單元等構成. CCD 安裝在機械手末端執行器上,構成手眼視覺,超聲波傳感器的接收和發送探頭也固定在機器人末端執行器上,由CCD 獲取待識別和抓取物體的二維圖像,并引導超聲波傳感器獲取深度信息. 系統結構如圖1 所示.
圖像處理主要完成對物體外形的準確描述,包括以下幾個步驟:a. 圖像邊緣提取;b. 周線跟蹤;c. 特征點提取; d. 曲線分割及分段匹配;e. 圖形描述與識別.在提取物體圖像邊緣后, 采用周線跟蹤進行邊緣細化,去除偽邊緣點及噪聲點,并對組成封閉曲線的邊緣點進Freeman 編碼,記錄每一條鏈碼方向和曲線上各點的X-Y 坐標值,進一步對物體的幾何特性進行分析.CCD 獲取的物體圖像經處理后,可提取對象的某些特征,如物體的面積、曲率、邊緣、角點及短軸方向等. 根據這些特征信息,可得到對物體形狀的基本描述,在圖像處理的基礎上,由視覺信息引導超聲波傳感器對待測點的深度進行測量,獲取物體的深度信息,掃描得到距離曲線,根據距離曲線分析出工件的邊緣或外形.
2 工件圖像邊緣的提取
復雜工件反映在圖像上常常不止一個灰度等級,僅利用一個灰度閾值無法提取有意義的邊緣.
這里采用了直接從灰度圖像提取邊緣的方法.圖像邊緣一般發生在灰度函數值不連續處,可用灰度函數的一階或二階導數求得. 經典的利用一階導數提取邊緣的方法有Robert s 算子、So2bel 算子等, 利用二階導數提取邊緣的方法有Laplacian 算子和Marrs2Hilderth 算子等. 通過對幾種算法的分析比較,認為Sobel 算子不僅實現容易、運算速度快,而且可提供最精確的邊緣方向估計.Sobel 算子由兩個3 ×3 相差90°的算子構成,由這兩個算子同圖像卷積, 可得到圖像的邊緣及其方向. 對于數字圖像{ f ( i , j ) } , Sobel 算子可表示為:
Gx ( i , j) = f ( i - 1 , j - 1) +2 f ( i - 1 , j) + f ( i - 1 , j + 1) - f ( i + 1 ,j - 1) - 2 f ( i + 1 , j) - f ( i + 1 , j + 1) ;
Gy ( i , j) = f ( i - 1 , j - 1) +2 f ( i , j - 1) + f ( i + 1 , j - 1) - f ( i - 1 ,j + 1) - 2 f ( i , j + 1) - f ( i + 1 , j + 1) .
采用G1 = | Gx | + | Gy| 得到梯度幅值后,為減少所抽取的邊緣數目,可設置一個幅度門限,即只考慮對應灰度變化較大的那些邊緣. 再利用邊緣點具有局部幅度最大的特點,將邊緣細化.利用Sobel 算子提取邊緣后, 為了得到工件表面的尺寸信息, 還必須提取圖像的角點 , 以便計算工件的邊長等特征信息.
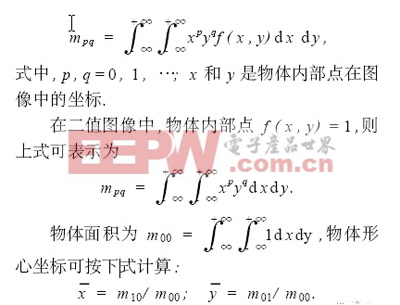
2. 1 形心坐標的確定
圖像中形心點的計算通常可通過兩種方法得出, 一是通過區域處理求矩的方法計算形心坐標 ;二是通過邊緣鏈碼積分計算。該算法較為簡單,且對任意圖形都適用,但需要結合像素點隸屬區域劃分算法進行.
2. 2 軸向的確定
為使機械手能以正確的姿態準確地抓取物體,必須精確確定物體的軸向. 在幾何學中,物體的長軸定義為通過物體形心點的一條直線, 物體關于該直線的二階矩為最小值. 設圖像中物體長軸與圖像平面X 軸正方向夾角為θ, 規定| θ| ≤π/ 2 ,則物體關于該軸線的二階矩為
該算法較為簡單,且對任意圖形都適用,但需要結合像素點隸屬區域劃分算法進行.
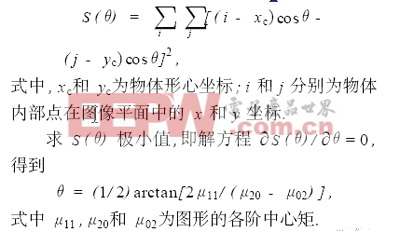
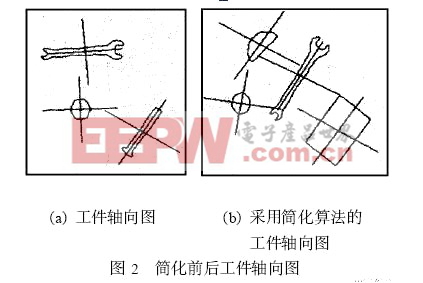
很明顯,基于二階慣性矩的軸向確定方法是對整個物體區域進行運算, 且必須先確定像素點的隸屬區域,故運算量較大. 圖2 (a) 是用該算法確定的工件軸向. 對于一些簡單形狀的物體,可采用如下簡單軸向估計算法:
a. 確定物體的形心坐標;
b. 確定物體邊緣輪廓閉合曲線前半段中離物體形心最近的點, 用最小二乘法估算該點的切線方向,設其與圖像平面X 軸正方向夾角為α1 ;
c. 用同樣方法確定下半段曲線中對應的切線方向α2 ;
d. 物體軸向可粗略估計為θ= (α1 +α2) / 2.
圖2 ( b) 是采用簡化算法得到的工件軸向圖. 該算法僅對物體邊緣輪廓點進行處理,使運算時間大為減少.
3 超聲深度檢測
本文采用超聲波測距傳感器, 經圖像處理得到工件的邊緣、形心等特征量后,引導機械手到達待測點,對工件深度進行測量,并融合視覺信號與超聲信號,可得到較完整的工件信息.安裝在機器人末端執行器上的超聲波傳感器由發射和接收探頭構成,根據聲波反射的原理,檢測由待測點反射回的聲波信號,經處理后得到工件的深度信息.
4 實驗結果及結論
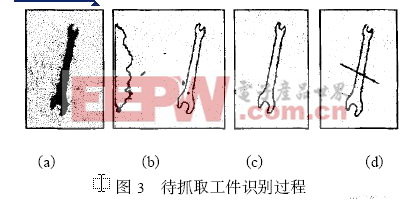
在上述方法研究的基礎上, 完成了在MOVEMASTER2EX機器人裝配作業平臺上進行的物體識別與抓取實驗. 在自然光及一般照明條件下,對機器人裝配作業平臺上視場范圍內任意放置的3~5 個不同形狀、大小的典型工件進行自動識別和抓取,結果表明,識別時間小于5 s(包括識別、定位與抓取過程機械手的移動時間) ,定位誤差小于±2 mm ,并具有較好的通用性和可移植性. 圖3 (a) ~ (d) 分別是待抓取工件識別過程的圖像.
結論: 采用本文提出的將機器人手- 眼視覺與超聲波測距相結合的檢測裝置, 以及融合二維圖像信息與深度信息進行工件識別與抓取的方法,具有算法簡單、計算量小、可靠性高等特點,可為機器人與環境交互提供物體形狀、類別以及大小等信息,使機器人裝配作業能適應各種復雜的環境與工藝過程,對實現工業生產過程的自動化、柔性化、智能化有良好的應用前景.









評論