基于DSP的永磁同步電機伺服控制系統設計

摘要:目前,在數控機床、自動化生產線、工業機器人等小功率應用場合,以永磁同步電機(PMSM)為控制對象的全數字交流伺服系統正逐步取代直流伺服系統。介紹了PMSM的數學模型和磁場定向控制原理,并以TMS320F2808型DSP為核心,結合伺服控制特點,設計了一套功能完善、實時性好的PMSM交流伺服系統。實驗結果表明電流環響應迅速、速度和位置閉環控制無穩態誤差,證明所設計的硬件系統工作可靠,控制速度快。
關鍵詞:永磁同步電動機;數字信號處理器;伺服控制
1 引言
隨著高效率的逆變器、數字信號控制器、高性能伺服電機和控制理論的發展,交流伺服系統取代直流伺服系統成為必然的趨勢。
PMSM轉子無勵磁繞組,電機運行效率高,采用高效的稀土永磁材料勵磁可以有效地減少電機體積重量,實現高力矩輸出,轉子轉動慣量明顯降低。因而PMSM廣泛應用于高性能的交流伺服驅動系統中。
此處設計了一種以TMS320F2808型DSP為核心的全數字PMSM伺服控制硬件平臺,在此平臺上采用矢量控制算法控制PMSM,實現了位置、速度和電流三閉環控制。
2 位置伺服控制策略簡介
沿用理想電機模型的一系列假設,經過一系列推導可得PMSM在轉子同步旋轉d,q坐標系下的數學模型。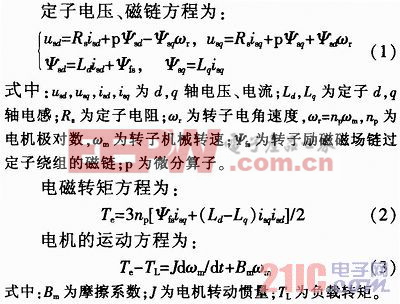
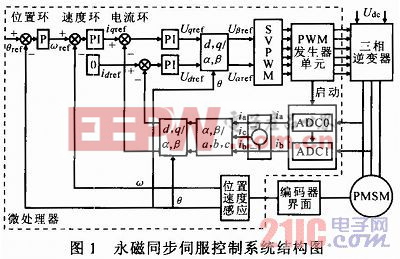
如果不考慮磁路的凸極效應,那么Ld=Lq。由式(2)可知,當is與d軸的夾角為90°時,可獲得最大轉矩。此時,Te=3npψfsisq/2,由此可得,只要保持is與d軸垂直,可像控制直流電機那樣,通過控制isq來控制轉矩,實現PMSM轉矩的線性化控制。圖1示出基于轉子磁場定向的PMSM伺服控制系統的結構圖。

伺服電機相關文章:伺服電機工作原理










評論