基于OPenWrt的移動機器人系統設計

直流電機驅動模塊以L298N芯片為核心,該芯片具有帶載能力強的特點。直流電機驅動電路如圖2所示。驅動電路芯片的外圍電路主要是由二極管構成的電橋電路與2組電機并聯連接,以達到控制電機按照設定運轉的目的。本文引用地址:http://www.104case.com/article/149116.htm
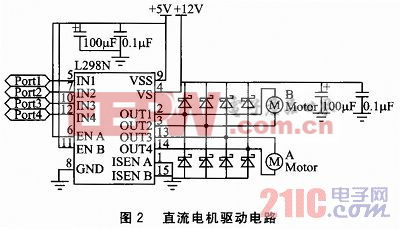
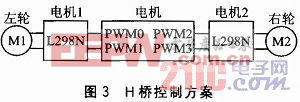
電機共有4路PWM輸Ⅲ分別作為左右輪的驅動,而通過2路PWM輸出可控制一個電機,兩個電機以并聯方式連接。
當L298N芯片使能信號ENABLE為高時,輸出才隨輸入變化,否則為高阻態,所以焊接時,ENABLE引腳及電源引腳VS均接電源VCC。
具體驅動過程為:通過編程由控制芯片經PWM發出驅動信號,PWM輸出作為L298N的輸入,經L298N轉換輸出控制信號使電機轉動,從而實現電動機的驅動。
PWM輸出信號的高低則可以控制直流電機轉速。當占空比加大時,轉速升高;占空比減小時,轉速降低;當PWM信號輸出占空比為0時可控制電機的停止。
當左輪停止,右輪轉時,小車左轉;當右輪停止,左輪轉動時,小車右轉。而2路PWM輸出的正負順序轉換則可控制電機的正反轉,進而控制小車的前進和后退。
3 系統軟件設計
軟件部分是移動機器人的智能化的體現,它控制移動機器人所有的運行狀態。
操作系統采用了OpenWrt操作系統,該系統簡化了Linux內核的定制過程,而且允許開發者使用軟件包的概念來定制嵌入式設備,從而簡化了嵌入軟件開發的流程。
程序在Kubuntu CodeBlock IDE集成開發環境中進行編寫,用OpenWrt編譯出來的ARM eabi交叉編譯工具編譯,再經過終端Sercurt-CRT通過串行口向移動終端燒入交叉編譯后的程序以及系統。
應用軟件控制小車的避障、攝像、發送視頻等行為。通信方面通過在主機端用vsttp軟件架設FTP服務器,并通過IEEE802.11g(RTL8187)無線網卡建立無線局域網。這樣,移動終端就可以接收上位機的控制命令到達指定地點拍照并發送圖片,而PC機終端就可以接收通過Wi-Fi傳送過來的圖片。

51單片機相關文章:51單片機教程
路由器相關文章:路由器工作原理
路由器相關文章:路由器工作原理








評論