智能車光電傳感器布局對路徑識別的影響研究

一字型布局是傳感器最常用的布局形式,即各個傳感器都在一條直線上,從而保證縱向的一致性(圖7),使其控制策略主要集中在橫向上。
本文引用地址:http://www.104case.com/article/14478.htm
第三節中已經提到,對于不同的間隔選擇,其出現情況數也相對不同。本仿真試驗采用的是間隔大于25mm且兩兩并列的布局方式,這樣在跑車時可以產生13種不同的情況(見圖8),從而使得控制更精確。
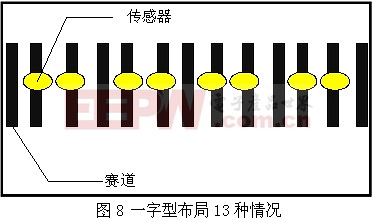
首先,對于傳感器有輸出值的(即其中有一傳感器照到黑道)情況,則根據其所在的位置進行相應控制;其次,對于迷失情況,可利用之前哪個傳感器輸出情況來推斷車此時進入哪一段區域。這里選用兩兩并列就是為了能明確區分出具體區域,如果不這樣排列,則當出現迷失時,將無法判斷黑道在左邊還是右邊。
4.2 八字型布局
八字型布局(見圖9)從橫向來看與一字型類似,但它增加了縱向的特性,從而具有了一定的前瞻性。
將中間兩傳感器進行前置的主要目的在于能夠早一步了解到車前方是否為直道,從而可以進行加速。對于韓國大賽所使用的賽道來看,直道占了全程的50%以上,因此直道時的加速控制是很重要的。

我們知道,對于智能車能否順利跑完全程,最重要的一點是過彎道,特別是通過比較急的彎道的能力。因此為了能夠更早地預測到彎道的出現,我們還可以將左右兩端的傳感器進行適當前置,從而形成“W”型布局。
值得一提的是,由于縱向的排列不一致,就比一字型更增加了多傳感器同時感應的可能性(一字型只可能是所有傳感器同時感應,而八字型則可能出現幾個傳感器同時感應的現象)。因此,在決定控制策略時,必須要考慮這種情況,但反過來說,我們也可以利用這種情況的發生來完成一些特定的判斷(比如某彎道角度的確定等),這就需要大家更深入的研究和嘗試了。
5 其他因素
除了上述內容之外,在進行傳感器布局時,還需要注意以下幾個因素:
首先,大賽規則對于賽道的描述有提到“跑道可以交叉,交叉角為90°”,而在起跑點兩邊還分別有長100mm的起跑線。在比賽時智能車必須通過傳感器將這兩種線區別開來,因此這也是在傳感器布局時所必須要考慮的問題之一。
其次,與韓國大賽不同,本次大賽可使用至多16個傳感器(韓國比賽為8個),因此在排列上會有更大的自由性,更可以和其他傳感器(例如CCD等)進行配合,從而實現更好的控制效果。
最后,由于本文采用的傳感器輸出值經過處理轉換為數字信號,因此根本上來說,整個智能車的控制必定是不連續的控制。為了達到更好的控制效果,可以考慮不將傳感器處理成數字信號,從而達到連續的控制效果,這也是一個值得探討和深究的問題。



















評論