智能車光電傳感器布局對路徑識別的影響研究
——

由于光電傳感器已可通過電路轉換為數字量輸出,因此在仿真系統中已簡化為直接數字量輸出,即當傳感器遇到黑線時則輸出為1,否則輸出為0。Plastid仿真系統最多提供8個光電傳感器,其安裝坐標可任意選擇,在仿真過程中會即時地將傳感器的值以布爾型的數組類型輸入給控制程序,如圖3所示。
本文引用地址:http://www.104case.com/article/14478.htm
3 布局相關參數
有關傳感器布局的參數有很多,本節將主要針對其中最重要的兩個參數進行定性的討論。
3.1 傳感器間隔
各個傳感器的布局間隔對智能車行車是有一定的影響的。
根據本屆邀請賽的賽道規則,中間黑色導引線的寬度為25mm,因此如果要求傳感器間不出現同時感應現象(即每次采集只出現一個傳感器值為1),那么傳感器間隔就必須大于25mm。如果將間隔設計成小于25mm,從而產生更多的情況,有利于車與賽道偏移距離的判斷。此外,如果間隔過大,還會出現另一種情況,即在間隔之間出現空白。
為了便于比較不同的傳感器間隔造成的影響,在Plastid仿真系統中使用相同的控制策略,并且在控制策略中設定了限制速度(從1m/s按0.5m/s的間隔遞增,直到車出現飛車完成不了單圈為止),賽道也選用韓國大賽的標準賽道進行測試,仿真周期設為15ms。
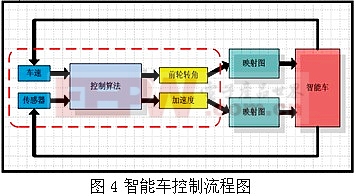
整個控制策略采用最簡單的分段控制,如圖4中的紅框區域。



















評論