智能車光電傳感器布局對(duì)路徑識(shí)別的影響研究
——
作者:周斌,李立國(guó),黃開勝
時(shí)間:2006-07-09
來源:電子產(chǎn)品世界
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
根據(jù)仿真,得到以下結(jié)果(圖5):
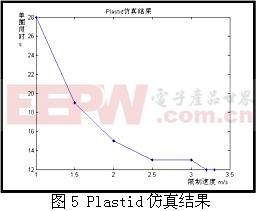
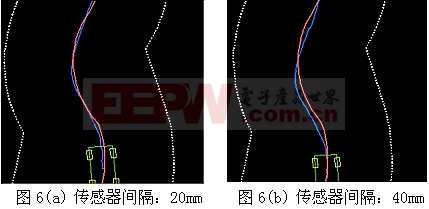
根據(jù)仿真的結(jié)果顯示,傳感器間隔對(duì)于過彎道精確性以及防止飛車的能力有很大的關(guān)聯(lián)。
對(duì)于防飛車能力,我們可以用最大限制速度來衡量。20mm間隔的最大限制速度在3m/s,40mm間隔的最大限制速度則為3.3m/s。經(jīng)過分析后,我們認(rèn)為這是由于傳感器間隔大造成車的橫向控制范圍較大(40mm的車控制在±13mm內(nèi),而20mm的則在±7mm內(nèi)),因此它不易造成迷失。
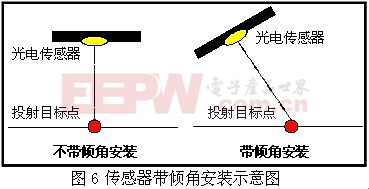
3.2 徑向探出距離
徑向探出距離是指光電傳感器離車頭的徑向距離。它主要影響智能車的預(yù)測(cè)性能。對(duì)于未知的賽道,如果能早一步了解到前方道路的情況,那么就可以早些做出調(diào)整,從而使車以相應(yīng)最優(yōu)策略通過賽道。所以,理論上探出距離是越大越好,但是如果距離過大,智能車可能會(huì)發(fā)生重心偏移,造成行駛不穩(wěn)、振動(dòng)等一系列問題。因此,為了既能增加徑向距離,又不引起重心偏移,我們可以采用帶傾角的傳感器安裝方式,如圖6中所示。
4 一字型與八字型布局研究
4.1 一字型布局



















評(píng)論