Cyber15隊智能汽車競賽技術報告(節選)

然后,將卡爾曼濾波矩陣形式轉化為方程形式:
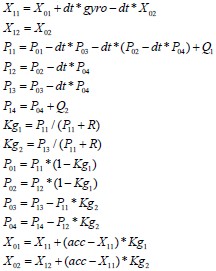
這里,X01即為我們需要的角度卡爾曼濾波值。
可以看到的是,卡爾曼濾波方程形式共有14個公式,同時很多參數的運算涉及浮點數,這對于單片機的高效運行時極為不利的,因此我們需要通過一些方法對卡爾曼濾波的公式進行化簡,從而在不失精度的情況下,盡可能減小運算量。
需要注意的是,Q,R兩個參數是關于傳感器和系統的方差,他們隨著系統的工作狀況不同而會產生相應變化,對應到我們的系統,在車模運行狀態不同(傾角不同,PWM不同)情況下,Q,R都是不同的。
根據相關參考文獻,Q,R雖然都是關于時間的變量,但是由于卡爾曼濾波有很好的收斂性,所以可以將Q,R都取比較極端的參數。用常量來定義。然后再看圖3,注意方框中的公式,根據我們的觀察,不難發現,整個方框中都是為了獲得卡爾曼增益(矩陣Kg),我們設想,能否使用一個常數來等效替代卡爾曼增益那?根據我們在實驗中的觀察,卡爾曼增益是一個收斂的變量,并且針對到我們的這個系統,他的值非常小,直立狀態下趨近于一個常數。(所有這些工作都在MATLAB下完成)
所以,我們將方框中的所有公式完全省略,通過實驗整定,選取一個近似Kg來替代方框中的所有運算。同時,通過NATLAB觀測各變量的變化趨勢,我們嘗試讓Kg2=0(Kg1,Kg2本身就是非常小的變量,所以可以讓其等于0)。并發現Kg2對于整個卡爾曼濾波的影響非常有限。所以將Kg2設定為0。
以下就是我們組程序中卡爾曼濾波的簡化算法實現
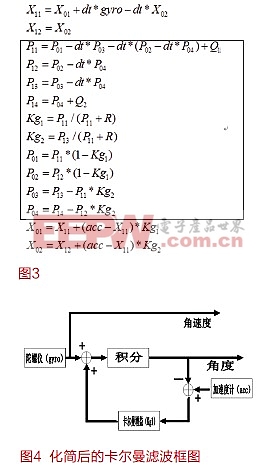
X1=X0+gyro*dt;
X0=X1+(acc-X1)*kg;
化簡后的卡爾曼濾波框圖如圖4。
卡爾曼濾波參數整定
化簡后的卡爾曼濾波主要是對dt以及Kg兩個參數進行整定。需要特別指出的是,這里的dt并不只是一個采樣間隔。由于陀螺儀的輸出和加速度計輸出的量綱并不相同,所以陀螺儀采樣值*dt并不直接反應一個角度,而是與實際角度相差一個系數。因此此處的dt可以等效理解為dt=采樣間隔*比例系數。
dt越大,積分速度越快,卡爾曼輸出追隨實際角度的情況越好(當然不能太大,不然可能會出現超前相位)。但是dt越大,陀螺儀漂移造成的影響也就越大。
Kg決定了加速度計的權重。Kg越大,實際輸出的漂移就越小,但是濾波效果的噪聲也就越大。
所以dt和kg是一對矛盾,不能太過于極端。
首先是靜態整定。
將車模保持在穩定直立狀態,讓車輪以恒定PWM(80%以上)轉動,然后調節參數。












評論