Cyber15隊智能汽車競賽技術報告(節選)

摘要:車模使用飛思卡爾加速度傳感器MMA7260以及村田公司ENC-03陀螺儀進行卡爾曼融合,獲取車模直立姿態。使用電容電感組成的諧振電路檢測電磁信號幅值。通過二輪差速進行車模的轉向。
本文引用地址:http://www.104case.com/article/140283.htm使用卡爾曼濾波的原因
當決定使用加速度計(反應角度)以及陀螺儀(反應角速度)以后,我們對參考的論文中為何要同時使用加速度計以及陀螺儀產生過一些疑問。因為如果需要角速度,我們可以通過![]() 這樣的方法對加速度計進行微分,計算出角速度,或者可以通過對于陀螺儀
這樣的方法對加速度計進行微分,計算出角速度,或者可以通過對于陀螺儀![]() 積分,從而獲得角度。既然如此為何我們需要使用兩個傳感器。
積分,從而獲得角度。既然如此為何我們需要使用兩個傳感器。
于是,我們對兩個傳感器進行了數據采樣,觀測其輸出信號的關系。由于考慮電機轉動產生的震動會對傳感器產生比較大的干擾,因此我們測試了不同PWM占空比下傳感器輸出,并用MATLAB繪制曲線,并進行相關運算。
首先是陀螺儀的數據測試(見圖1),隨著PWM占空比的不斷提高,陀螺儀的噪聲也更加顯著。
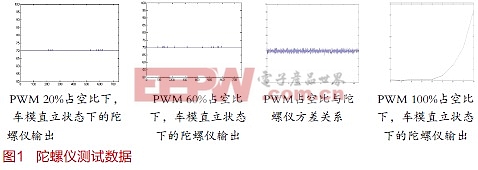
表1是我們通過MATLAB計算獲得的一些數據。此處我們用方差表征傳感器噪聲大小。
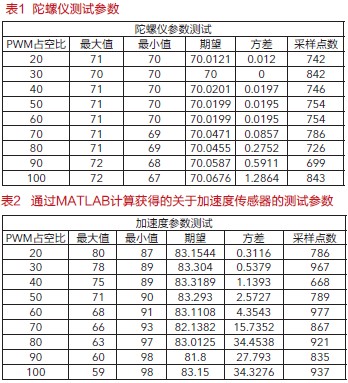
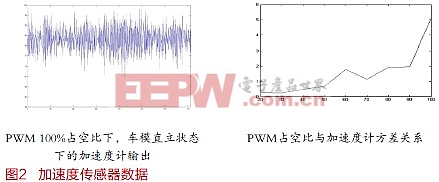
之后我們對加速度傳感器進行了測試,如圖2。通過以上數據,我們不難獲得以下一些結論。
1、陀螺儀的噪聲還在可以接受范圍,但是加速度計噪聲已經遠遠超出可控范圍接受。
2、對于加速度計做一個補充說明,加速度計在車模直立狀態下,電機PWM占空比100%噪聲情況下,幅值映射到實際角度大約是60度左右。根本不能直接使用。
3、方差(可以等效理解為噪聲大小)隨著占空比不斷增加。
4、加速度計雖然噪聲很大,但是長時間來看,他的數學期望是非常穩定的。
5、陀螺儀的噪聲比較小,但是他的誤差會對積分造成漂移。
無論是加速度計還是陀螺儀,都有自己的優勢和劣勢。簡而言之:加速度計短時間內不可信,但是長時間內可信。陀螺儀短時間內可信而長時間內不可信。這也就是為什么車模直立必須使用兩個傳感器來完成信號獲取。因為單個傳感器不可靠,只有取其精華去其糟粕,發揮兩個傳感器的共同優勢,才能夠取得好的效果。于是,我們需要一種算法,能夠在短時間內置信陀螺儀,而長時間內置信加速度計的算法。這就需要卡爾曼濾波。
卡爾曼濾波化簡
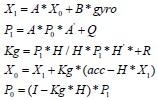
上述五個公式便是卡爾曼濾波的五條數學公式在本項目中的使用。但是,以上五個公式,僅僅只是矩陣形式。雖然可以在MATLAB里進行仿真,但是卻不能使用單片機進行有效運算。












評論