基于雙排傳感器的循跡策略研究

幾點說明:
本文引用地址:http://www.104case.com/article/133353.htm 1.在公式![]() 中,所有狀態(tài)對應(yīng)的k值均有大量測試數(shù)據(jù)支持,考慮到每個車的舵機性能不同,k值需要根據(jù)舵機的個性作出相應(yīng)的調(diào)整,就不再此羅列數(shù)據(jù)。
中,所有狀態(tài)對應(yīng)的k值均有大量測試數(shù)據(jù)支持,考慮到每個車的舵機性能不同,k值需要根據(jù)舵機的個性作出相應(yīng)的調(diào)整,就不再此羅列數(shù)據(jù)。
2.小車測試的賽道為3條。分為橢圓形圈圖,其中一側(cè)帶有S彎。較復雜賽道(總長16.7m)。復雜賽道(總長29.7m)。最后為第二屆飛斯卡杯華北賽區(qū)比賽賽道。
3.小車經(jīng)過上述策略控制后,能適應(yīng)幾乎所有類型的賽道,并在某些特殊點上有精彩的表現(xiàn)。
4.本策略對舵機性能要求較高,要求舵機有快的反應(yīng)速度。要求對舵機作出改進。
參考文獻
[1] 邵貝貝.單片機嵌入式應(yīng)用的在線開發(fā)方法[M].清華大學,2004
SHAO Beibei. The On-board Exploited Method of MCU for Embedded Application [M] Tsinghua University Press, 2004
[2] 卓晴等.學做智能車.北京航空航天大學出版社. 2007.3
[3] http://www.freescale.com.cn
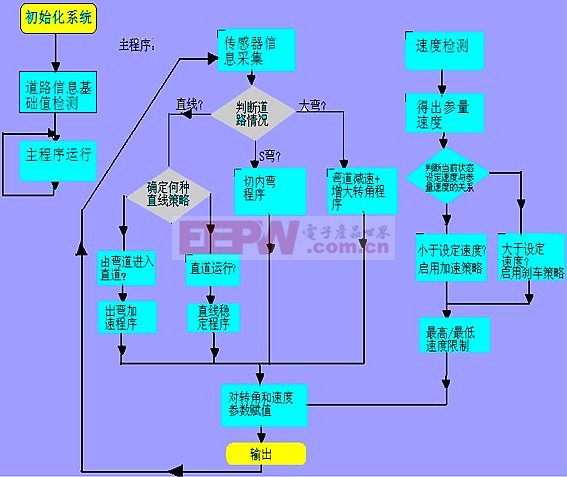
附1:程序流程圖
附2:其他控制策略
1. 采用最高速度限制。在直線加速中,防止速度無限增加,采用速度反饋來限制小車的最高時速,保證在最大速度時能通過所有與直線相接的賽道。
2. 采用最低速度限制。引入最低剎車速度概念,低于此速度時,禁止剎車。
3. 剎車方式采用程序循環(huán)檢測剎車。在程序的最開始,每次檢驗是否允許剎車,當前速度與設(shè)定速度的差值決定剎車力度。當速度沒有達到設(shè)定值時,每次循環(huán)均剎車。
4. 為了防止加速過猛時輪胎打滑,采用pwm遞增的方式加速,直到到達設(shè)定速度,pwm遞減,穩(wěn)定最高時速。












評論