基于雙排傳感器的循跡策略研究

姿態2:識別為90°/180°彎,舵機轉角加大,將直道穩定程序轉換為彎道控制程序,并啟動剎車制動程序(判斷當前速度大小與給定此條件下極限速度值的差距,以程序執行周期為單位調整剎車力度)。剎車結束后,采取加速策略彌補剎車速度的損失。(加速度小于直線加速度)
本文引用地址:http://www.104case.com/article/133353.htm 彎道控制策略:轉換到彎道程序后。首先,增大舵機轉角控制公式中![]() 的值,略微增大對彎道不敏感的
的值,略微增大對彎道不敏感的![]() 的值。使相同的傳感器在彎道中的轉角更大,以適應 90°/180°彎等需要大轉向的彎。此策略更適應今年新出現的大波浪彎。之后,把傳感器中心左移一個傳感器(針對右彎),達到切內彎的效果。進入直道后取消中心左移。
的值。使相同的傳感器在彎道中的轉角更大,以適應 90°/180°彎等需要大轉向的彎。此策略更適應今年新出現的大波浪彎。之后,把傳感器中心左移一個傳感器(針對右彎),達到切內彎的效果。進入直道后取消中心左移。
*注:前排傳感器與前輪之間的距離也會對小車的切內彎效果產生影響。
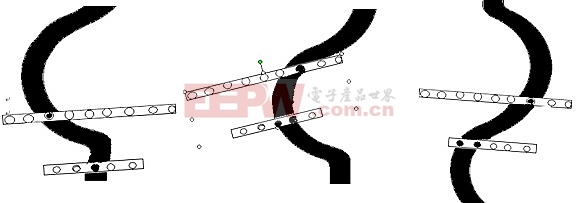
我們的前排傳感器與與小車距離10cm左右,在橫向傳感器布局上稍加調整,即使不加任何切內彎的控制策略,仍會有切內彎的效果。程序中優化了這種過彎方式,加入了平滑過彎,及時判斷出彎策略。
下圖為實測切內彎效果;圖中情況滿足直線預測加速策略,下一個動作為直線加速。(圖為視頻文件中截取的照片)

S彎識別方式及控制策略
以下圖為例闡述彎道策略。雙排紅外優于單排最明顯的地方就在與S彎道。通過S彎的最佳方式是直行通過。
從圖中也可以看出,此時的情況智能車只要直行就可以,所以我們把舵機轉角控制的公式中的![]() 值進行調整,使之在此種情況下近似直行即可。也就是說,讓小車在行進中切每個彎的內線。所以,我們適當增大后排k值比重,前排k值減少。
值進行調整,使之在此種情況下近似直行即可。也就是說,讓小車在行進中切每個彎的內線。所以,我們適當增大后排k值比重,前排k值減少。
S彎入彎情況及S彎中策略控制狀態(上圖)
(1)入S彎時,由于后給出的轉角值為0,
(2)入S彎的第二個狀態。由于前排給出向前排給出的左轉角度k值被縮小,小車右的轉角,后排也給出向右的轉角。此時,向左轉很小角度。 兩個量之和作為舵機的控制量,此擴大的控制量被舵機執行,達到切內彎的效果。
(3)此時傳感器給出的組合是出彎時加速狀態。此處分兩種情況:
<1>速度慢時,小車嚴格循跡時,沒有過多的晃動,即沒有碰到1號或7號前排光電管時,沒有觸發彎道程序,故不存在出彎加速的判斷,可順利通過此彎,不會出現振蕩。
<2>速度快時,遇到S彎,小車晃動較大,會觸發彎道程序,隨即啟動剎車制動程序,可有效抑制小車的晃動,使小車嚴格循跡。
*注:從兩屆的比賽跑道來看,一般都是大彎后,接S彎,出彎的速度不快,可以穩定循跡。在決賽的跑道上可能會出現長直線接S彎的情況,此時車速很快,遇到S彎會有較大晃動,使1或7號光電管觸發剎車程序,使速度降低,達到順利通過S彎的目的。












評論