人形機器人,有什么值得期待?
在那個第一臺黑白電視機在美國初初面世、距離后世著名的“圖靈測試”問世仍有11年的年代,這樣酷炫的產品自然引起了世界范圍的關注。一時間,Elektro風頭無兩,上電視、演電影、到各地巡回演出,甚至擁有了自己的機械狗Sparko。
以當下的技術眼光看,Elektro這些所謂的“技能”其實更多是噱頭——所謂的“走路”,依靠的是輪子和軌道;與操作員的“對話”,則是通過預先設計好的特殊音節(jié)代碼實現;而別具特色的“抽煙”,則是靠助手把煙塞進它上嘴唇的洞中并點燃。
高調亮相的背后,卻是,普通的落地。
而這一幕與當下人形機器人們的處境也何其相似:本田的Asimo表演踢足球,波士頓動力的Atlas能后空翻,小米的“鐵大”在發(fā)布會上給雷軍獻花后還學起了敲架子鼓。人們充滿驚奇地欣賞完舞臺秀之后,卻在商業(yè)應用方向感嘆:就這?
80年過去了,人們對機器人的想象早已不是這樣“形”上的模仿,而是期待一款真正能成為勞動力替代的全能型產品,并且要經濟實惠到足以從實驗室走進生產線,切實在某個應用場景中發(fā)揮效用。那在供需天平的另一端,制造機器人的企業(yè),圍繞"人形"做文章已久,又是否真正努力過實現機器代人?
據此,本文將回顧走在技術研發(fā)前線的兩款機器人,Asimo與Atlas的艱難產業(yè)化進程,盤點當下最火“擎天柱”O(jiān)ptimus的技術亮點,以此展望:人形機器人,商業(yè)化路在何方?
01還沒有一家人形機器人公司能實現商業(yè)化
人形機器人發(fā)展至今,已經見得了總統(tǒng),上得了春晚,當得了男團,功能酷炫上天,但在商業(yè)上還是難以落地。本田Asimo、軟銀Pepper均已經停產,波士頓動力Atlas、特斯拉Optimus也還尚處于實驗室階段。為何產業(yè)化那么難?就拿人們最期待的本田Asimo和波士頓動力Atlas來說一說。
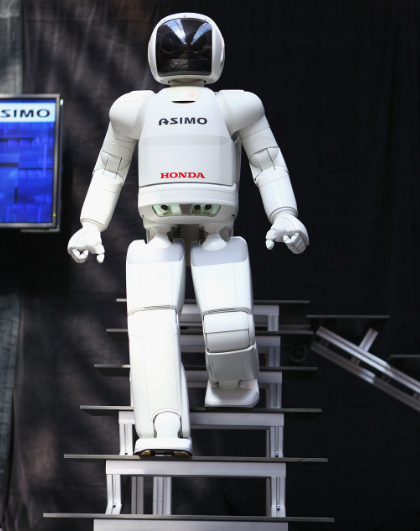
“時代先驅”本田Asimo ,Born in 2000
從高達和新世界福音戰(zhàn)士等一系列日本動漫可以看出,似乎日本對于人形機器人有一種與生俱來的執(zhí)念,而濃厚的機器人產業(yè)底蘊以及良好的經濟基礎,也給這個時期的日本研發(fā)人形機器人提供了良好的環(huán)境。
自 1967 年起,日本人就在仿人機器人領域孤獨地前行了半個世紀。而本田的ASIMO ,被認為是致敬著名科幻作家阿西莫夫Asimov,它作為全球最早實現雙足行走能力的機器人,代表了日本人形機器人的最高成就。
持續(xù)半世紀的孤獨前行
Asimo前前后后迭代了6個版本。第一階段1986年至1993年,主要攻克機器人下肢運動能力,解決雙足運動和穩(wěn)定性的難題。第二階段從1993至2000年,逐漸增加了頭、身體和手臂,此時,可以說,一個完整的Asimo雛形初現。此后第三個階段,本田似乎想要在Asimo的靈巧手上發(fā)力,機械手(B25J )的專利數量在2003-2008年達到頂峰,占據了本田機器人相關專利近60%。
最新發(fā)布的Asimo單手有 13 個自由度,雙手自由度幾乎占到全身自由度的一半,通過液壓驅動實現精細動作,從而能比劃手語,在不捏碎杯子的情況下拿起杯子。本田研發(fā)有限公司資深總工程師兼本田人形機器人項目負責人Satoshi Shigemi說:「很明顯,整體的靈活度是必需的,并因為手部運行能力的提升,它能夠完成更復雜的任務。
現實與夢想的差距
雖然酷似阿童木的Asimo一出生就受到世界人民的喜歡,但實際表現卻不能像動畫片里的機器人戰(zhàn)士一樣滿足人們對人形機器人的一切幻想:只能完成“擰開蓋子”“倒水”“踢足球”“跑步”這樣的簡單功能,會把高舉手機照相的動作誤認為“舉手”,然后一直不停地說“有什么問題要問Asimo?”,充滿電后僅能運動1小時。
Asimo更像是一個宣傳人形機器人的大使,周游全球,這與本田想要機器人服務老年人的初衷背道而馳。除此之外,300-400萬美金的造價,一個月10萬人民幣的租賃費也讓人瞠目咂舌,而目前日本平均護工的工資也不過1.5萬人民幣/月。本田公司機器人相關專利申請時間分布,數據來源:incoPat 專利檢索
雖然Asimo代表了人類一個時期最強的人形機器人,但高昂的成本、并不成熟的供應鏈體系、差強人意的表現,以及更聚焦細分功能、場景的掃地/服務機器人等商業(yè)進展迅速,最終導致Asimo在2018年退出歷史舞臺。
“地表最強”雙足機器人Atlas,Born in 2013
Atlas,可謂是“流離失所、坎坷一生”。
1992年,學術派創(chuàng)業(yè)者Marc Raibert院士從麻省理工將Leg Lab 實驗室(致力于研發(fā)腿式機器人)剝離出來,成立了波士頓動力公司。得益于Leg Lab優(yōu)良的腿部運動研究基礎,波士頓動力獲得了美軍的青睞,旗下人形機器人Atlas的雛形就源自于2009年為美軍測試防護服性能的機器人Petman。
2013年,谷歌母公司Alphabet收購了波士頓動力,第一次市場化嘗試卻不如意,一個想要市場,一個堅持理想,沖突不斷升級,終于,谷歌在2015年關閉了機器人部門Replicant,并在2017年將波士頓動力賣給了軟銀。然而,軟銀在愿景基金帶來的約1.8萬億日元(約171億美元)的投資虧損下,也不得不斷尾求生,于2021年將波士頓動力賣給了韓國現代。
追求極致的運動能力
為了將運動能力做到極致,Altas使用了液壓動力裝置,依靠流體動力可在狹小空間實現密集解決方案,特別適合大負載的場合,例如運載火箭的發(fā)動機、中國空間對接綜合試驗臺,還有那滿大街的挖掘機。框架和腿則采用3D打印技術,巧妙的將液壓管道內置在3D打印鈦金屬骨骼內,有點模仿人類血管在骨骼內那味兒了。
同時,通過頭部的搭載的RGB攝像頭和TOF深度傳感器獲取更加全面的環(huán)境信息,利用自創(chuàng)的“軌跡優(yōu)化行為庫"和模型預測控制器(MPC),根據運動情況調整其發(fā)力、姿勢、動作發(fā)生時機等細節(jié)。
除了秀,還能干啥?
在以上如此優(yōu)異的性能下,劣勢也顯而易見。首先,昂貴。Atlas使用了很多特殊和高成本零部件,一臺造價就高達200萬美金,而同臺跳舞的的機器狗spot雖然售價不到1/20,也僅售出200來臺。其次,“嬌嫩”,維護成本高、噪音高、電耗高等。波士頓動力也承認,Atlas機器人的可靠性還無法與機器狗spot相比。最后,寂寞,找不到合適的應用場景。
Asimo、Atlas,雖然相差十三年,但結局卻一樣,高昂的成本、缺失的場景,只能淪為行業(yè)先驅。
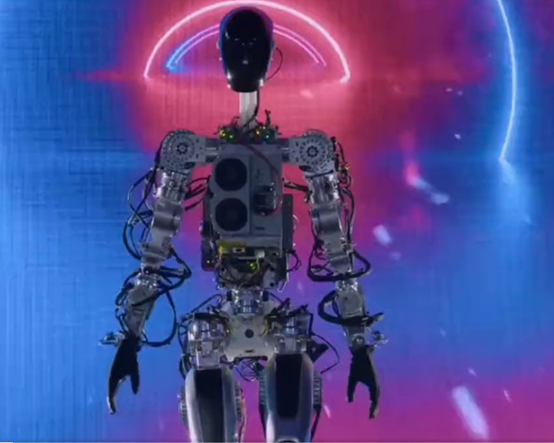
02馬斯克的擎天柱,再一次點燃信心
時間回到2006夏日的一天,馬斯克夢到一個完全自動化的未來制造工廠,機器人高速制造所有東西,這些東西被傳送帶在正確的時間運送到正確的地方。夢醒后興奮的馬斯克,宣布特斯拉要用“機器生產機器”,也就是建立全自動化工廠模式。
接下來便是特斯拉眾所周知的“產能地獄”經歷。而自動化工廠的失敗,并沒有打消馬斯克對于全無人工廠的執(zhí)念,反而播下了量產“工人”的種子。他多次在公開場合發(fā)起了牢騷:為什么現在的機器人,都無法實現像人手一樣實現“撿起零件并放置在電池上”這類簡單的任務。
因此,當人形機器人Optimus發(fā)布時,馬斯克還特意讓機器人演示了一遍這個動作,以表成功。但從效果來看,Optimus還是落了個“高開低走“的狀況,運動能力嚴重落后于公眾預期。不過,它那雙五指靈巧的手,還是值得深究,成為人形機器人商業(yè)落地的一個重要突破口。
Optimus的“靈巧手”,圖片來源:特斯拉AI DAY 2022發(fā)布會預告
研究一雙靈活的手
人手能以每秒300度的速度移動,擁有成千上萬的觸覺傳感器和21個主動自由度,是人類勞動最完美的工具。而人類對機器人多指靈巧手的研究,則是從假肢開始的,作為一個單獨學科,已經有64年的研究歷史。
目前主流的靈巧手有兩種方式,一種是內置式,即將驅動、傳感、控制等所有的驅動執(zhí)行零部件都集成在手掌內。典型代表的靈巧手,是由哈爾濱工業(yè)大學機器人研究所 (HIT) 和德國宇航中心 (DLR) 合作了20多年共同研發(fā)的,而這個手掌因為集成零件多,也是普通人手掌的1.5倍大。
另一種,則是外置式。即將體積較大的電機驅動器外置在手臂,采用拉線方式從遠端控制靈巧手的關節(jié)。這種方時和內置相比,成本更低、難度也有所降低。典型代表是英國的shadow hand,而馬斯克的Optimus也采用這種方式。
一歲嬰兒就會抓取,但對于機器手而言,且不說完全比得上人手,即使可以使用,都走了一段半個世紀的研發(fā)路。那么,馬斯克的Optimus,有什么不同呢?
左右滑動查看,驅動外置靈巧手代表:英國shadow hand,圖片來源:Shadow Robot
左右滑動查看,典型內置式多指靈巧手:DLR-HIT Hand II 靈巧手,圖片來源:Institute of Robotics and Mechatronics
人形機器人“第一手”
Optimus的設計靈感來自于生物學,和人手一樣同樣使用5個手指,擁有11個自由度。像拉線玩偶一樣,由5根“經脈”(線驅動) 獨立控制手指的彎曲和展開,負重20磅(9KG)和自適應抓取(能夠抓取不同形狀、尺寸的物體)的能力,因此,使得Optimus的手部勞動力能夠勝任工廠的一般工作。
手腕則由兩根執(zhí)行器控制,這個設計不僅能讓手腕轉動,還可以做水平的動作,這也是目前市面上其他人形機器人鮮有見到的。除此之外,特斯拉還需要將4-5kg左右的電驅手臂集成在雙足機器人上,這對人形機器人的行動、操作和精巧抓取都提出了更高要求。
雖然Optimus在技術領域實現了提升,但對于人形機器人而言,更重要的話題是:成本,能夠量產降本才是核心。
量產的突破
馬斯克準備用SpaceX的套路打造機器人,一切都是以規(guī)模產業(yè)化為目的,以指數級砍成本。
一方面大量復用特斯拉汽車現有技術降維打擊,包括電池、散熱、視覺避障等。胸腔內安置的2.3kWh的電池,能支撐Optimus工作一整天。這個耗電量,差不多也是一個成年勞動者一天消耗的能量。另一方面全身都沒有使用特殊訂制的零部件,而是優(yōu)化了全身 28 個驅動器設計參數,最終采用通用的兩類六種伺服關節(jié)(基于無框力矩電機+諧波減速器的旋轉關節(jié),基于力矩電機+滾珠絲杠的線性關節(jié))。而至于Optimus比老人還走的慢,那是因為特斯拉損失了一定響應速度,以降低能耗。
通過這套流程下來,Optimus的吸引力大增:2萬美金一臺、一周工作7天、充電一次工作一整天。而對比之下,美國特斯拉工廠一個普通工人工資一小時最少16.2美元,一個月近6000美元,也就是說,3個月普通工人的工資,就能買下一臺一周工作007、不會請假、不會抱怨的高效“廉價勞動力”。
而在小批量量產以后,馬斯克還可以將Optimus放在特斯拉超級工廠里,邊工作邊迭代,也許將來有一天,我們會看到成千上萬個Optimus在火星上幫人類搭建家園。
正是因為有了量產的規(guī)劃、手的突破,因此,鋼鐵俠馬斯克,還是給大家?guī)砹撕芏嗥诖?/span>
03技術的演進路徑
人形機器人的發(fā)展還處于突破技術壁壘的早期階段,導航定位、環(huán)境感知、指令分析、行為控制等關鍵技術,都還沒完成從“能用”到“好用”的長征,那么,會有哪些技術演進路徑呢?
雙足行走,不是移動機器人的唯一選擇
雙足對于人形機器人來說承擔著移動的任務。但相比起來,輪式和四足機器人應用更成熟、成本更小、技術難度更低。波士頓動力曾公開表示,目前Atlas將不會商業(yè)化,真正實現商業(yè)化的是它的四足機器人。這兒大膽猜測一下,特斯拉的Optimus,是否會像馬斯克的第一輛電動酷炫超跑一樣,目前的雙足只是噱頭,最終產業(yè)化的時候又會回到四足或是輪式?
機械手的靈敏度,反映人形機器人的技術實力
靈巧手的關節(jié)越多代表越靈活,能做的操作也越多。本田從足部運動轉向機械手研究,雷軍公開招募靈巧手機械工程師,也說明了人形機器人的玩家,開始意識到手的重要性。
機器人1.0時代的代表“機械臂”模仿人手在制造和組裝流水線,進行著無聊的、重復的、固定的工作;機器人2.0時代的代表物流機器人,通過輪子在提前規(guī)劃好的路徑移動,利用視覺感知獲取信息并判斷,將物品搬運至固定的位置。
這兩個階段的“手”,也就是末端執(zhí)行器,可以是帶有噴槍、焊槍的工具,也可以是氣動吸盤(如波士頓動力Handle Logistic機器人),又或是模仿人手的夾鉗(如小米鐵大)、三指夾爪等。
而機器人3.0時代的手,也許會是布滿了傳感器,通過感知物體的重量、大小、溫度,采取不同的姿勢和力度對不同形態(tài)的物體實施抓取,并使物體表面受力比較均勻,再加上頭部的機器視覺、算法等技術,最終可以像人一樣進行更準確的判斷。
智能交互,才是我們期待的未來
“手”的操作離不開“腦”的決策,“智能化+類人形+低成本”是機器人發(fā)展的主要趨勢。
機器人研發(fā)一般采用“本體—技能—智能”自下而上的研發(fā)路線,從雙腿運動逐步擴展到手等功能部件,最后考慮智能化。人形機器人的未來將是,如何讓人形機器人“更聰明”,面對復雜的跨場景工作模式,要真正地實現代替人,還需提升AI技術的感知能力。
目前的 AI 應用層面仍然過于單點化,只有 AI 能力實現,實現由單點智能向全局智能、由認知智能向決策智能的跨越,我們才能與更聰明的AI 機器人頻繁互動。而通過硬件、算力、算法、數據等要素持續(xù)迭代升級,實現人與機器人之間達到人和人之間的交互體驗,這也是終極人形機器人商業(yè)化發(fā)展的重要一步。
04結語
一款真正能成功產業(yè)化的產品,除了技術的成熟、成本的降低,最重要的還要有足夠廣闊的落地場景:例如二維碼,也是在技術成熟15年后,才在微信“掃一掃加關注”這個場景下,得到了前所未有的應用。
而機器人行業(yè),會有一道共性難題:標準化生產、和非標準化的應用場景。標準化、大規(guī)模生產,才有助于降低成本;但要實現大規(guī)模,場景必然會擴大,于是又會面臨許多非標準化的需求。這是機器人不同領域、不同公司都要平衡的要素。
縱觀目前大規(guī)模應用的各類機器人,能快速實現商業(yè)落地的,大多有幾個特點:功能單一、使用場景固定、需求清晰,比如工業(yè)機械臂、掃地機器人等。而人形機器人既有優(yōu)勢、又有劣勢,更需要對矛盾“把玩琢磨”。
一方面,人形機器人的天然優(yōu)勢在于其通用性。集成功能多、終極通用裝置,一款成熟的產品即可適用于廣泛的需求場景,不再有傳統(tǒng)“工業(yè)機器人”、“服務機器人”這樣明確的功能屬性。因而,具備標準化、大規(guī)模生產的基礎,可以快速降本。
但,另一方面,正是因為哪里都能用,所以,也有可能會顯得,哪里都不是最好用,或者說,有些功能是冗余的。因此,找到場景就很關鍵。
比較之下,工業(yè)場景也許是人形機器人邁向產業(yè)化的第一塊陣地。工業(yè)場景,既有需求,可以將人類從繁重、危險的“4D”工作中解放出來;又具備一定通用性,適配部分工業(yè)場景領域分散、各自規(guī)模較小的問題。同時,在經濟性上,相對于C端客戶,工業(yè)場景的支付意愿、能力也更高。
人形機器人,技術在不斷突破新高,但人類的需求也在不斷豐富、復雜。這是一場供給和需求的賽跑、技術和商業(yè)的較量,前后者之間,似乎就像程序員永遠跟不上產品經理的步伐一樣。但幸運的是,技術的發(fā)展,并非線性,奇點之后就會有極大跨越。
也正因此,在大眾紛紛失望嘆氣之時,人形機器人領域創(chuàng)業(yè)者和投資人們,依然會在心里打氣:這是“長坡厚雪”。
來源:遠川科技評論
*博客內容為網友個人發(fā)布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。