can-lin 文章 最新資訊
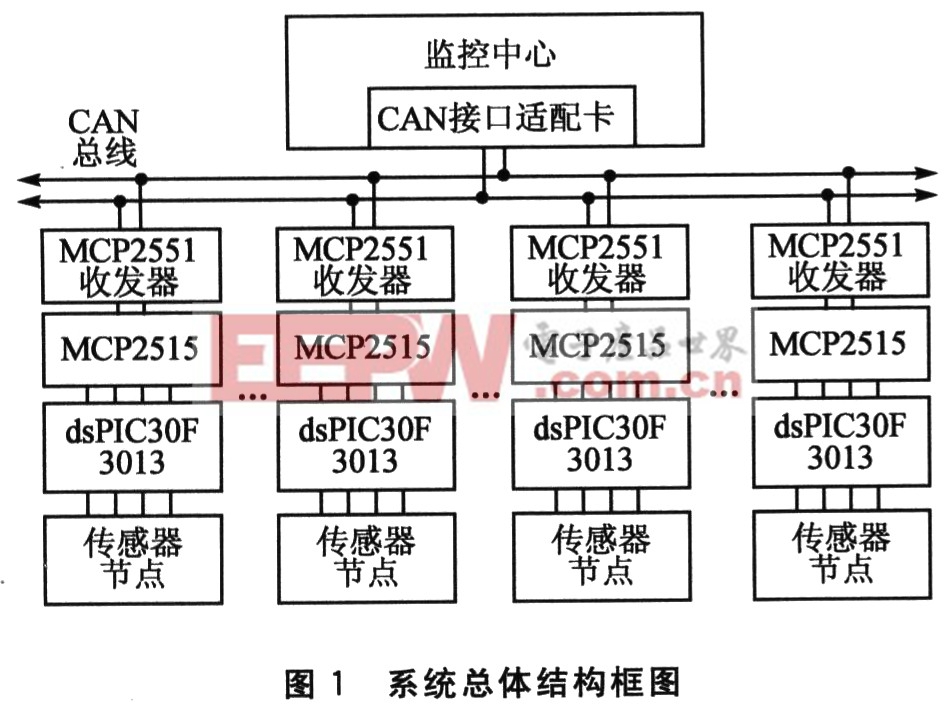
基于CAN總線的井下多參數(shù)監(jiān)控系統(tǒng)的設(shè)計
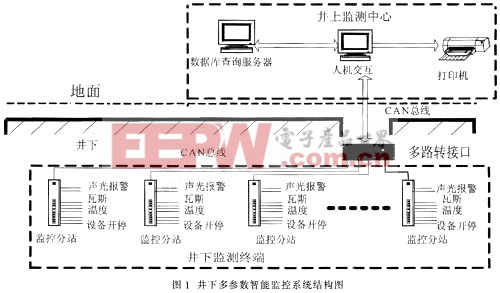
- 介紹一種基于CAN總線的礦井下多參數(shù)智能參數(shù)監(jiān)控系統(tǒng)。該系統(tǒng)能夠?qū)崟r監(jiān)測井下包括瓦斯?jié)舛取L(fēng)速、溫度、負壓、液位等各種參數(shù),并進行一定處理,再經(jīng)CAN總線通信傳送回井上監(jiān)控主機,地面主機人機交互通過虛擬儀器來實現(xiàn),具有工作狀況監(jiān)控、數(shù)據(jù)記錄查詢、顯示以及歷史數(shù)據(jù)記錄和分析等功能,有很高的推廣價值。
- 關(guān)鍵字: 監(jiān)控系統(tǒng) 設(shè)計 參數(shù) 井下 CAN 總線 基于 CAN

CAN總線到Ethernet網(wǎng)的網(wǎng)關(guān)研究實現(xiàn)
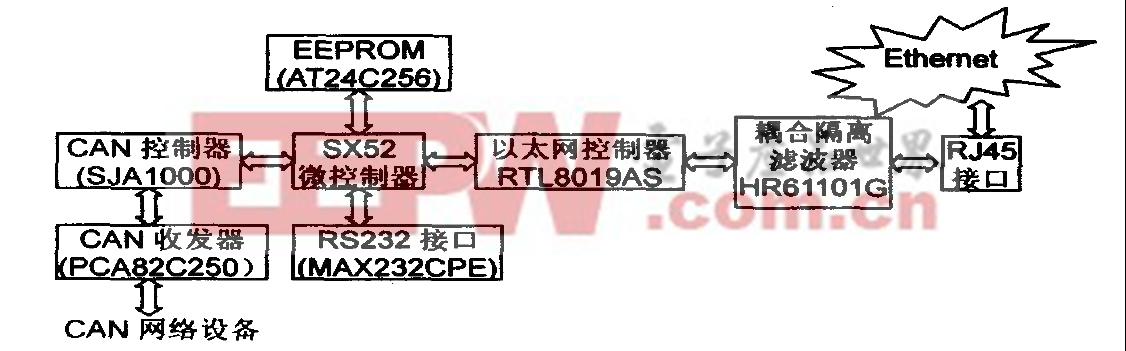
- 文中介紹了一種CAN總線到以太網(wǎng)網(wǎng)關(guān)的軟硬件研究與實現(xiàn),該網(wǎng)關(guān)采用高速、高性能、低價格的8位單片機SX52作為微控制器,SX52通過以太網(wǎng)控制芯片RTL8019AS與以太網(wǎng)相連,進而連接到Internet。該設(shè)計可以實現(xiàn)基于TCP/IP協(xié)議的計算機網(wǎng)絡(luò)設(shè)備與基于CAN總線協(xié)議的底層現(xiàn)場網(wǎng)絡(luò)互連。
- 關(guān)鍵字: 研究 實現(xiàn) 網(wǎng)關(guān) Ethernet 總線 CAN CAN
can-lin介紹
您好,目前還沒有人創(chuàng)建詞條can-lin!
歡迎您創(chuàng)建該詞條,闡述對can-lin的理解,并與今后在此搜索can-lin的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對can-lin的理解,并與今后在此搜索can-lin的朋友們分享。 創(chuàng)建詞條
can-lin相關(guān)帖子
can-lin資料下載
can-lin專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司