車載雷達機電式自動調平系統的方案

本車載雷達平臺調平過程具體分兩個階段完成。第一階段為架設階段,即車載雷達到達陣地后,先控制四個支撐腿著地,進行落地檢測。系統通電后,操作人員只需按操作面板上的“架設”鍵,控制系統驅動伺服電機升支撐腿,同時檢測各支撐腿是否著地,當某一支撐腿著地后停止該腿的升動作。當四個支撐腿全部著地后,落地檢測結束。第二階段為調平階段。操作人員按操作面板上的“調平”鍵,單片機讀取水平傳感器送來當前車載平臺的傾斜度數據以及壓力傳感器送來的各支撐腿的受力數據,根據傾角數據和壓力數據,按照控制策略驅動相應電機上升相應支撐腿,直至座車傾斜度達到雷達系統的要求。
本文引用地址:http://www.104case.com/article/99726.htm系統程序工作流程
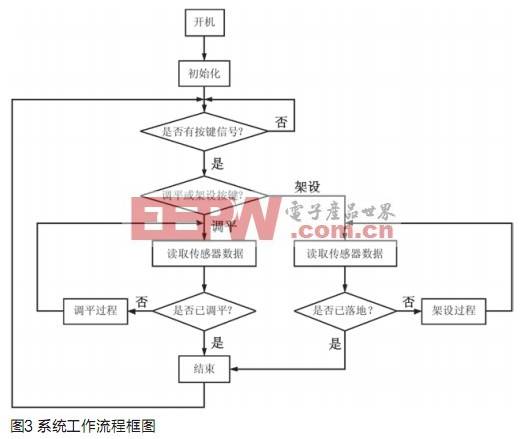
本系統的工作流程框圖如圖3所示。

伺服電機相關文章:伺服電機工作原理




評論