車載雷達機電式自動調平系統的方案

4點及多點調平設計面臨的一個主要問題是虛腿現象,即有一個腿受力很小或者懸空,這在調平過程中是不能允許的。當平臺的負載均勻時,4個支撐點的受力應該均勻。本系統設計的處理辦法是把平臺支撐起來后,先進行一次粗調平(設定一個粗精度),目的是使4個支撐點的受力比較接近。然后,再按照系統設定的調平精度進行調平。這樣,調節的過程就中不會出現一腿受力過小(虛腿),從而有效的預防虛腿現象的出現。
本文引用地址:http://www.104case.com/article/99726.htm硬件組成
該自動調平系統硬件組成如圖2所示。系統主要由控制部分、水平傳感器、壓力傳感器、伺服控制器、伺服電機及伺服電動缸等組成。
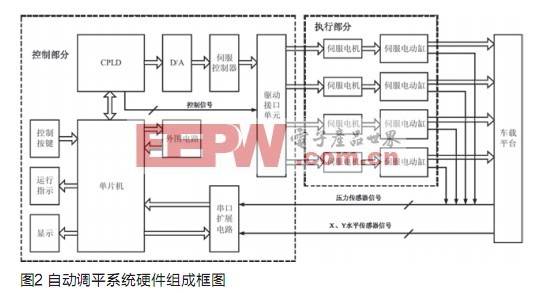
水平傳感器(X、Y兩個方向)測量車載平臺的傾斜度,通過RS232串行口向控制部分發送X方向和Y方向的傾角數據,波特率采用9600bit/s。本系統采用的水平傳感器其測量精度(零位)為0±20",分辨率≤4",完全滿足平臺傾角測量和調平的要求。
壓力傳感器用于測量4個支撐腳承受的壓力,測量范圍0~9000kg,通過RS232串行口向控制部分發送壓力數據,波特率采用9600bit/s。
控制部分主要由控制板、伺服驅動器和驅動接口單元組成。控制板是控制部分的核心,主要由單片機、CPLD、多路DAC、多串口擴展電路、RS232電平轉換電路、看門狗電路等組成。當操作人員通過按鍵將控制指令發送到控制板,CPU讀取水平傳感器、壓力傳感器送來的數據進行判斷并形成控制策略,產生控制信號由DAC送達伺服控制器,再控制驅動接口電路驅動某一路伺服電機運轉,直至調平。為了操作安全起見,整個調平運行過程通過聲、光進行指示。控制部分實時地將傾角、壓力數據進行顯示,方便操作人員監控。

伺服電機相關文章:伺服電機工作原理




評論